The actual path for the space-centroid (explanation given at Wikipedia) Would be interesting to see, and is something that Grunde could do by analyzing the velocity of two or more points near the butt of the rod on his slow motion videos.
You might first check out a video that shows a typical instantaneous center flow before you try to plow through the details given below.
This may be something of interest to just Bob and me, as it involves a concept in rigid body dynamics that most non-technical readers will just have to take on faith. However, it was a chance for me to learn something about video processing, and the result may be illuminating to many readers.
Most people are probably not interested in the dynamics principle involving the instantaneous center derivation, but it is a handy way to look at the velocity values at different points on a rigid body that is undergoing both rotation and translation. The instant center (I.C.) of rotation is the point in space about which all points on the rigid body are revolving around at one instant of time.
Thus the velocity of any point on the body can be determined from Vp=omega x r, where omega is the rotation rate about the I.C. axis in radians/sec and r is the vector from the I.C. to the point on the body. This cross product will give the direction of Vp (it will be perpendicular to the direction of r) in addition to its magnitude omega*r.
If the body is just rotating (such as a freely spinning wheel) then the I.C. will be located on the object. If the body is undergoing pure translation the I.C. will be located at infinity. If the body is undergoing both rotation and translation then the I.C. will be at a finite distance from the body, but in general will not be located on the body itself.
The butt of a fly rod is not strictly a rigid body since it can bend somewhat, but the butt is rigid enough that we can apply the I.C. of rotation concept to see how the effective rotation center of the rod varies during a cast.
Generally the I.C. is determined by finding the intersection of two vectors that are taken at right angles to the velocity vectors (v has a direction as well as a magnitude) measured at different points on the rigid body. Similarly, it can be found by finding the perpendicular bisector of two points on the body taken at two different time points as shown in diagram below that was used in the Wikipedia article.
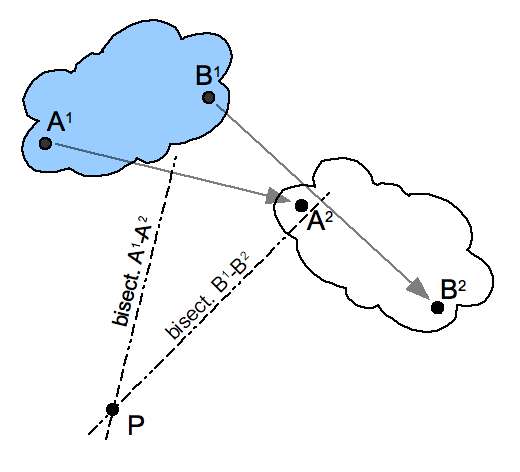
This bisector approach is what I used to find the I.C. of the rod rotation since it was a more direct way to analyze the spatial data taken from individual video frames. For the few people that might be interested in the details of finding the I.C. here how it was done.
First I digitized three different points near the butt of a high speed video as they moved from frame to frame on the video data. The points I used were the butt end of the rod, the top of the grip, and a point .45 m up from the grip. Then I computed the normal to each of those curved paths. From there I computed the three intersection point s of the normal vectors on a frame by frame basis to determine how the I.C. moved during the cast.
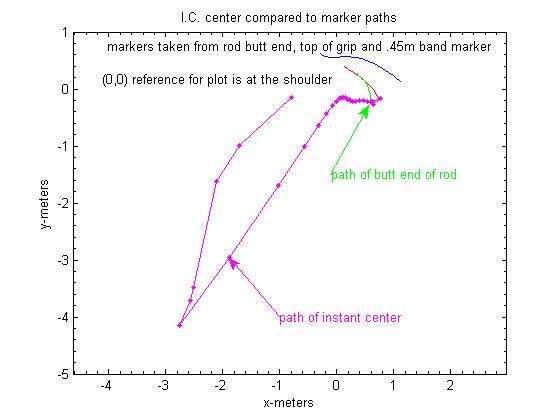
An example of determining the I,C. at one point in time with the bisector approach is shown below. I used three points instead of just two, as an accuracy check, and found the resulting intersection points to be surprisingly close to each other as shown in the figure. The final I.C. value I used was set equal to the average of the three points determined above for each video frame.
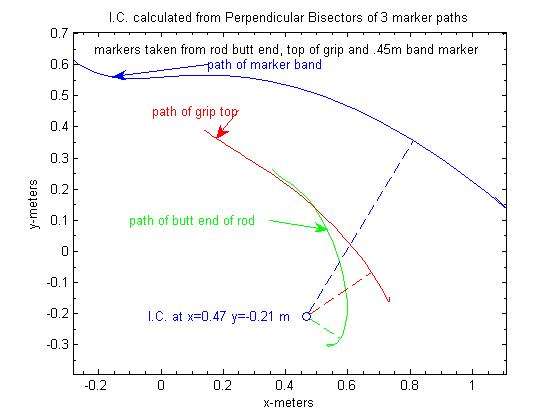
The blue curve in this plot shows the path of the .45 m marker on the rod. The red curve shows the path of the top of the grip, and the green curve shows how the butt of the rod moved during the cast. The (0,0) reference point for this plot was at the center of the shoulder, so you can see that at this point in time the I.C. was located .5 meter ahead and .2 meter below the shoulder.
A video of a 40 foot cast that shows the movement of the rotation center of the rod with a nominally vertical casting plane is shown at Vimeo. As noted on the video file, the red dot shows the location of the I.C. for a given frame. The blue line shows the hand path during the cast.
From this video you can see that for my casting style (and your results would certainly be different) the I.C. is out of the frame of the video at the beginning of the cast where most of the movement is due to just translation with very little rotation.
As the rod begins to rotate the I.C. is out of frame and then begins to move behind me and then towards my shoulder. As the angular velocity is increased, the I.C. moves down through the bicep, and then through the forearm. It ended up near the marker at the top of the grip as the rod approached RSP.
I am sure the path of this space centroid (definition is in the Wikipedia article) would be different for different casting styles, but it shows that the translation of the rod butt shifts the I.C. of rotation quite a ways from the shoulder, elbow, and grip at the start of the cast. It is interesting to see that combination of rotations coming from the shoulder and elbow cause the I.C. to run down the bicep and forearm, and then as those two joints stop rotating at the end of the cast the I.C. is near the grip as the rod approaches RSP.
For any given frame this shows that the rotation center is quite a distance from the grip during most of the cast, and would need to be taken into account in determining the actual MOI of the rod and reel. At the beginning of the cast; the large mass and distance of the reel from the I.C. would dominate the total MOI. The MOI of the reel would continue to be significant for much of the cast where the I.C. is at some distance from the center of the reel. This larger rotation distance would also cause an increase in the MOI of the rod as well.
Gordy