
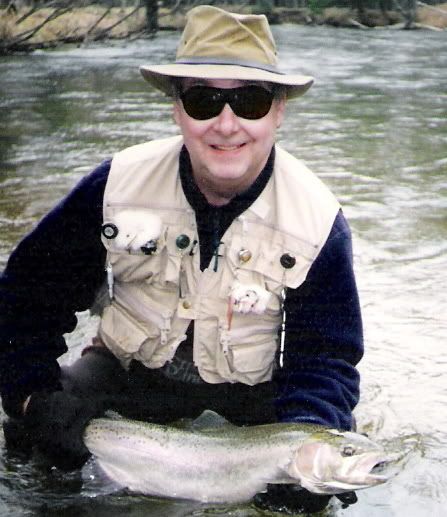
Again I would like you to take a look at this clip:
http://www.youtube.com/watch?v=B0mmsDtEwaw
The reason why I like this so much is the fact that it show where in the stopping sequence the torque from the caster on the rod changes direction.
In the clip Tom is using a "three point grip", when the torque is in the forward direction all the forcing is done by the thumb and the "pinky finger". At some point during "the stop" the but of the rod "flips over", and all the forcing is done by the index finger and his palm, and from then on the torque is backwards and thus aiding the stop of the forward rod motion.
Again, big thanks for posting Tom!
:pirate
Grunde
PLEASE NOTE: This is the Archived Sexyloops Board from years 2004-2013.
Our active community is here: https://www.sexyloops.co.uk/theboard/
Our active community is here: https://www.sexyloops.co.uk/theboard/
Harmonic Oscillator
-
grunde

- Master of The Kettle
- Posts: 1462
- Joined: Thu Sep 09, 2004 5:48 pm
- Location: Drammen, Norway
- Contact:
"Essentially, all models are wrong, but some are useful."
George E. P. Box
Always question the assumptions!
Flycasting Definitions
...
George E. P. Box
Always question the assumptions!
Flycasting Definitions
...
-
gordonjudd
- IB3 Member Level 1
- Posts: 2214
- Joined: Mon Jul 10, 2006 12:14 am
- Location: California
- Contact:
It would seem more realistic to curve fit the velocity data with a reasonable quadratic prior to differentiating it.
Bob,
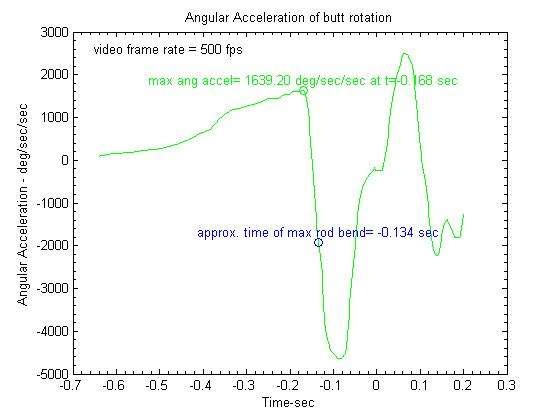
I don't know if this is what you are looking for, but here is "smoothed" angular acceleration plot taken from the measured butt phase angles for the Paradigm cast.
This requires two differentiations, so the "ripples" that come from taking the numerical derivatives were averaged out using a piece-wise spline fit to the raw derivatives. That results in an acceleration curve that can have any localized slope, rather than just a linear slope that would result from using a quadratic fit to the velocity data
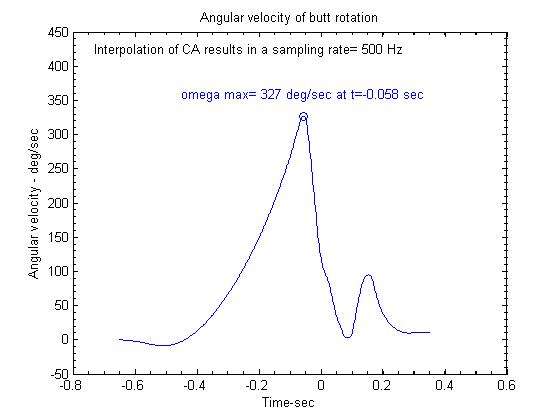
Here is the "smoothed" angular velocity plot that is derived from the derivative of the butt phase angles.

And here is the "smoothed" derivative of the angular velocity plot to get the angular acceleration of the rod butt for that cast.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
-
Paul Arden

- Fly God 2010
- Posts: 23925
- Joined: Sat Jul 26, 2003 10:35 am
- Location: Travelling
- Contact:
This change of direction in the thread makes sense to me if - I understand it correctly. When the rod unloads it creates an opposite force in the butt, which can cause the rod hand to move backwards.
I found it interesting that when Bruce tried to program his electronic casting machine they found it impossible until they fed Bruce's casting analyzer readout back into the machine. This created a two stage stop; the machine accelerated forward, stopped abruptly and immediately moved forward and stopped again. Now I don't think Bruce's hand does that when he casts, but somehow the muscles manage this. Without it the cast failed, which is similar to Jon's wooden casting machine; there has to be a give after the stop for the cast to work.
Sorry, two different points but somehow they relate at the "butt stop".
Cheers, Paul
I found it interesting that when Bruce tried to program his electronic casting machine they found it impossible until they fed Bruce's casting analyzer readout back into the machine. This created a two stage stop; the machine accelerated forward, stopped abruptly and immediately moved forward and stopped again. Now I don't think Bruce's hand does that when he casts, but somehow the muscles manage this. Without it the cast failed, which is similar to Jon's wooden casting machine; there has to be a give after the stop for the cast to work.
Sorry, two different points but somehow they relate at the "butt stop".
Cheers, Paul
-
gordonjudd
- IB3 Member Level 1
- Posts: 2214
- Joined: Mon Jul 10, 2006 12:14 am
- Location: California
- Contact:
I found it interesting that when Bruce tried to program his electronic casting machine they found it impossible until they fed Bruce's casting analyzer readout back into the machine.
Paul,
Ah, the mystery of the rebound hump!
I went around and around with Bruce several years ago about what causes the rebound hump, but at the time we could not even agree on when it was happening.
Bruce felt it was due to an experienced caster actively damping (or maybe giving into) the counterflex of the rod as it was going from RSP to MCF.
From video measurements you could see the peak of the rebound hump was actually happening as the rod was returning from MCF. Thus I thought the hump was a passive reaction to the torque related to the positive acceleration of the rod after MCF that was caused by its "kick back" going to RSP2.
That assumption followed from the data Robert Haun discussed in his master's thesis. He found the torsional stiffness of the wrist (when it had a firm grip on the rod) to be around 250 to 425 in-lbs/radian [338 to 576 N-m/rad]. Thus it will rotate several degree in response to the "kick back" torque produced in the rod when it returns from MCF.
For instance if that "kick back" torque was 40 N-m then it would cause the wrist to rotated by 40/338=.11 radians or 6.7 degrees. That is in the ball park of the additional butt phase increase you see from RSP1 to RSP2 as shown in the phase plot in post #161
I hope Merlin will come up with a reason why the kick back that happens when the tip is coming back towards the caster in a counter-clockwise direction produces a torque that is in the clockwise direction. That nagging fact still alludes me.
The stepper motor Noel used in his robot had a very high torsional stiffness, and thus would not "give in" to the kick back and damp out after-vibrations of the rod tip. Consequently they had to program the stepper to included a rebound hump rotation in order to make continuous false casts with the robot.
This change of direction in the thread makes sense to me if - I understand it correctly.
I think I will start a new tread addressing the total forcing torque in the cast to address Server Sadik's claim that:
"Fortunately, it can be easily shown that prior to RSP the caster never exerts retarding moments//torques on the rod and this fact is intuitively consistent with everything most people would believe about fly rod behavior during casting."
I do not know where the "easily shown" analysis was done to back up this statement (maybe Walter can find it), but
from an energy standpoint that claim is certainly not intuitively consistent to me, but it appears that it does make sense to many of the contributors to this thread (Merlin excepted).
I think that some analysis will show we do "put on the brakes" as Merlin characterizes it. As noted in post #144 I disagree with Grunde and Walter that the rod will unload as fast as it does since the potential energy in the rod is so much smaller than its K.E. at MAV, but time (and a new torque analysis routine) will tell.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
-
Bobinmich
- IB3 Member Level 1
- Posts: 606
- Joined: Fri Sep 14, 2007 4:09 pm
- Location: Rochester, MI
- Contact:
Thanks Gordy, that is exactly what I was looking for. I would have preferred that it be on the 50 caster data but this will do.
Now I am going to drive you all a little nuts. For years now I have been looking for a way to try to interpret from data, what a caster feels at the handle during a cast and how he uses it for timing. I know from many years of night casting for snook and for browns that I time my casts by feel. I have often said I can feel the rod load and when I feel what I think is the proper resistance, I try to maintain that load through the rest of the cast (to RSP).
My models have been showing a curious bump in the torque curve when the rod loads up. If you maintain that load through the rest of the cast, the rod deflection goes too high. So you must back down somewhat during the cast to prevent this.
I think Gordie's curve shows exactly that. It appears that the caster made a conscious change in loading around -.4 sec. If you look at the video, this is about where the rod has developed a significant deflection not too different form the rest of the cast to RSP. Now my video's of the paradigm cast don't line up exactly with the timeline on Gordies plot, but if you measure from an estimate of RSP, it comes out around -.4sec for the completion of the majority of rod deflection.
Do you suppose that the portion of the casting curve up to that "change" is indicative of what a caster subconsciously feels when he is comparing rods? Is he sensitive enough to feel differences in that part of the curve between rods with very slightly different diflection curves. This must be true if he is to be able to sense small differences in CCS - AA.
Gordy, I personally feel that the obvious change in slope around .4 on your plot has profound meaning.
Or maybe I am going nuts. It happens.
Bob
Now I am going to drive you all a little nuts. For years now I have been looking for a way to try to interpret from data, what a caster feels at the handle during a cast and how he uses it for timing. I know from many years of night casting for snook and for browns that I time my casts by feel. I have often said I can feel the rod load and when I feel what I think is the proper resistance, I try to maintain that load through the rest of the cast (to RSP).
My models have been showing a curious bump in the torque curve when the rod loads up. If you maintain that load through the rest of the cast, the rod deflection goes too high. So you must back down somewhat during the cast to prevent this.
I think Gordie's curve shows exactly that. It appears that the caster made a conscious change in loading around -.4 sec. If you look at the video, this is about where the rod has developed a significant deflection not too different form the rest of the cast to RSP. Now my video's of the paradigm cast don't line up exactly with the timeline on Gordies plot, but if you measure from an estimate of RSP, it comes out around -.4sec for the completion of the majority of rod deflection.
Do you suppose that the portion of the casting curve up to that "change" is indicative of what a caster subconsciously feels when he is comparing rods? Is he sensitive enough to feel differences in that part of the curve between rods with very slightly different diflection curves. This must be true if he is to be able to sense small differences in CCS - AA.
Gordy, I personally feel that the obvious change in slope around .4 on your plot has profound meaning.
Or maybe I am going nuts. It happens.
Bob
Bob Bolton
www.HATofMichigan.org
www.HATofMichigan.org
-
gordonjudd
- IB3 Member Level 1
- Posts: 2214
- Joined: Mon Jul 10, 2006 12:14 am
- Location: California
- Contact:
If you look at the video, this is about where the rod has developed a significant deflection not too different form the rest of the cast to RSP.
Bob,
Here is the measured perpendicular tip deflection for the Paradigm cast. The measured data is in red, and is compared to the response given by Grunde's car/spring/brick model in blue.

You can see the deflection never remains constant in that cast, and the maximum bend is reached at -.122 sec not at -.4 sec.
That is the whole point of treating the spring in the rod and the mass of the line as a forced harmonic oscillator. The deflection profile of the rod tip will depend on the loaded frequency of the SHO and the magnitude of the angular acceleration applied at the butt. There will not be an instantaneous reaction of the tip deflection to the applied acceleration as you seem to be saying.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
-
grunde
- Master of The Kettle
- Posts: 1462
- Joined: Thu Sep 09, 2004 5:48 pm
- Location: Drammen, Norway
- Contact:
gordonjudd wrote:I think that some analysis will show we do "put on the brakes" as Merlin characterizes it. As noted in post #144 I disagree with Grunde and Walter that the rod will unload as fast as it does since the potential energy in the rod is so much smaller than its K.E. at MAV, but time (and a new torque analysis routine) will tell.
Sorry I do not understand these statements...
But I do trust what my eyes can see (the bend in the rod) and what I feel in my hand (the forces from my hand on the rod) over results from some model system. And I think Tom's video nicely confirms my initial statement:
grunde wrote: I (like Server Sadik) believe that (at least) the first part of the rapid decceleration is caused by the unloading rod, and not by an active stop by the caster.
Cheers,
Grunde
"Essentially, all models are wrong, but some are useful."
George E. P. Box
Always question the assumptions!
Flycasting Definitions
...
George E. P. Box
Always question the assumptions!
Flycasting Definitions
...
-
Bobinmich
- IB3 Member Level 1
- Posts: 606
- Joined: Fri Sep 14, 2007 4:09 pm
- Location: Rochester, MI
- Contact:
Gordy,
Naturally, the harmonic model is smooth. It is not human. You would need to look at the data between -.6 and -.35 for the actual curve which you do not show. Haven't you ever cast at night? And if you have, how do you time your casts? Do you sense what is going on at the end of your rod by the load in your hand? Or do you pretend to be a model trying to fit a perfect mathematical curve?
I see this change in loading in some of my models too. Just as it shows up in your accel curve for the actual cast. I don't think this is accidental. That is why I wanted to get ahold of the data set for the expert 50. I will bet that discontinuity shows up there too. This is because humans are not perfect mathematical models.
Again, where can I get the data base for the perfect 50. I can email Noel I guess but I thought someone else might have them.
Bob
Naturally, the harmonic model is smooth. It is not human. You would need to look at the data between -.6 and -.35 for the actual curve which you do not show. Haven't you ever cast at night? And if you have, how do you time your casts? Do you sense what is going on at the end of your rod by the load in your hand? Or do you pretend to be a model trying to fit a perfect mathematical curve?
I see this change in loading in some of my models too. Just as it shows up in your accel curve for the actual cast. I don't think this is accidental. That is why I wanted to get ahold of the data set for the expert 50. I will bet that discontinuity shows up there too. This is because humans are not perfect mathematical models.
Again, where can I get the data base for the perfect 50. I can email Noel I guess but I thought someone else might have them.
Bob
Bob Bolton
www.HATofMichigan.org
www.HATofMichigan.org
-
Mangrove Cuckoo
- IB3 Member Level 1
- Posts: 15
- Joined: Thu May 12, 2005 8:22 pm
- Location: South Florida
- Contact:
gordonjudd wrote:
Here is the "smoothed" angular velocity plot that is derived from the derivative of the butt phase angles.
And here is the "smoothed" derivative of the angular velocity plot to get the angular acceleration of the rod butt for that cast.
Gordy
This is completely off the topic, but, if about 35 years ago, had my freshman calculus professor shown me these two graphs as evidence of why I should want to understand derivatives, etc…
Well, I’m pretty sure I would have spent more time studying, and maybe less time fishing – and I would probably be in a very different place today!
Fish now, you're dead a hell of a long time!

Well, plenty of interesting stuff.
Grunde
Our modern world is full of modeling. I like that since it is always challenging. What we can see from Tom's video is likely made with a short line (and so, it confirms your conviction), what about a long carry (the result might well be different, thanks to Tom if he can make it sometime)? If you look at Gordy's analysis of the Paradigm cast, you can see that the unloading takes place after the beginning of deceleration: how do you explain it (the SHO model does)?
Gordy
The torque values you mention from Dr Haun's work are high but not inconsistent with modeling. Currently, I am using a model for which the caster releases the grip he uses on the handle after the end of the cast, and guess what, I get the rebound. The torque history looks somewhat like the angular acceleration curves: negative torque at beginning of deceleration, then positive torque as the rod counter flexes, and again negative torque as it comes back to RSP2. There is however one inconsistency because I am not yet able to model the line launch correctly: there is some energy to spend to shape the loop, the line does not disappears at once from the system in less than 0.005 s, etc. Really interesting. Understanding the physics of the rebound does not seem being out of reach (but more work to be done...).
Merlin
Grunde
Our modern world is full of modeling. I like that since it is always challenging. What we can see from Tom's video is likely made with a short line (and so, it confirms your conviction), what about a long carry (the result might well be different, thanks to Tom if he can make it sometime)? If you look at Gordy's analysis of the Paradigm cast, you can see that the unloading takes place after the beginning of deceleration: how do you explain it (the SHO model does)?
Gordy
The torque values you mention from Dr Haun's work are high but not inconsistent with modeling. Currently, I am using a model for which the caster releases the grip he uses on the handle after the end of the cast, and guess what, I get the rebound. The torque history looks somewhat like the angular acceleration curves: negative torque at beginning of deceleration, then positive torque as the rod counter flexes, and again negative torque as it comes back to RSP2. There is however one inconsistency because I am not yet able to model the line launch correctly: there is some energy to spend to shape the loop, the line does not disappears at once from the system in less than 0.005 s, etc. Really interesting. Understanding the physics of the rebound does not seem being out of reach (but more work to be done...).
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
Charles Ritz, A Flyfisher's Life
-
gordonjudd
- IB3 Member Level 1
- Posts: 2214
- Joined: Mon Jul 10, 2006 12:14 am
- Location: California
- Contact:
Thanks Gordy, that is exactly what I was looking for. I would have preferred that it be on the 50 caster data but this will do.
Bob,
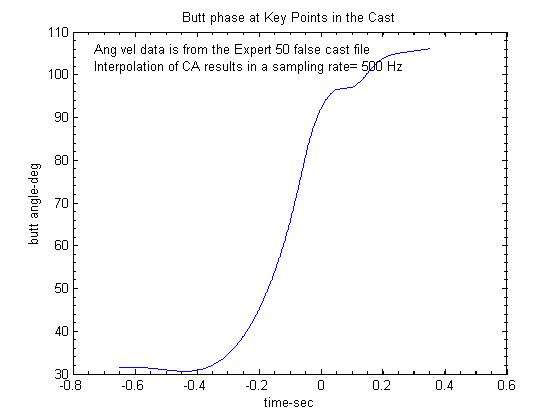
Here are the smoothed plots for the expert 50 CA file. My thanks to Noel Perkins for sharing his "expert" files with me several years ago.
Smoothed angular velocity:
and the smoothed angular acceleration
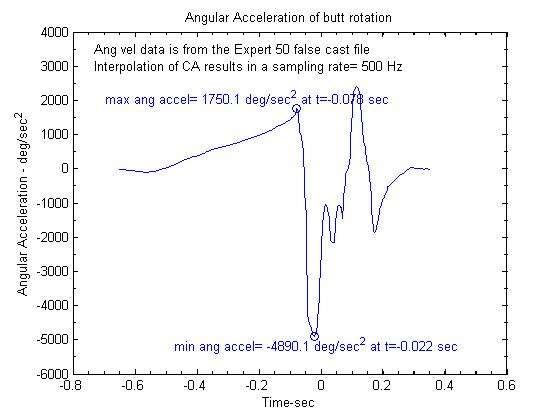
I will bet that discontinuity shows up there too. This is because humans are not perfect mathematical models.
Aside from a small blip right at MAV, you can see this acceleration curve has a nearly linear slope throughout the power application phase. Maybe that indicates Bruce Richards is like a machine when it comes to smoothly increasing the power application in a cast.
I think this data was taken several years ago when he and Noel were developing the CA. Since Bruce is now a proponent of constant acceleration, I would expect his current angular velocity curve would more linear than the quadratic one shown above.
From the plot of the butt angle for that cast you can see that Bruce had about two degrees of rearward drift before he started the acceleration for this false cast at around t=-.4 seconds.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
-
Bobinmich
- IB3 Member Level 1
- Posts: 606
- Joined: Fri Sep 14, 2007 4:09 pm
- Location: Rochester, MI
- Contact:
Gordy,
Thank you for indulging me and providing that data. You are correct in saying that there is no obvious inflection point in the acceleration curve. This is, as you probably already know, not what I expected. Many times real data has a habit of correcting preconceived opinions.
I was also wrong in assuming that the "Expert 50" was one cast from 50 people rather than 50 casts from the same person. My assumption was again, incorrect because that is not how I would have done it. I have always been suspect of conclusions drawn from one data set. I have seen upper management waste millions on one set of faulty data which could not be replicated later on different equipment.
But I remain convinced that there is an inflection point as the rod loads because I can feel the rod load in night casting and I adjust the rest of the stroke accordingly. Most models don't do that because the input force is a mathematical equation. So you would not expect any midcourse correction in force input in models like Grunde's car/spring model. But the models I am trying to make work use the input force at the thumb on the rod as the input and you have to adjust it to get a propper line acceleration curve. Because of the nonlinearity of the rod bending curve and the cosine effect of the rod load on the line, mid course adjustments are necessary to prevent over deflection the rod.
Undaunted, I will continue to labor down my, as yet, unsupported path and try to put some numbers to what I think I feel. And while it can be said, "A foolish consistancy is the hobgoblin of a simple mind," I will forge ahead.
Again, thanks.
Bob
Thank you for indulging me and providing that data. You are correct in saying that there is no obvious inflection point in the acceleration curve. This is, as you probably already know, not what I expected. Many times real data has a habit of correcting preconceived opinions.
I was also wrong in assuming that the "Expert 50" was one cast from 50 people rather than 50 casts from the same person. My assumption was again, incorrect because that is not how I would have done it. I have always been suspect of conclusions drawn from one data set. I have seen upper management waste millions on one set of faulty data which could not be replicated later on different equipment.
But I remain convinced that there is an inflection point as the rod loads because I can feel the rod load in night casting and I adjust the rest of the stroke accordingly. Most models don't do that because the input force is a mathematical equation. So you would not expect any midcourse correction in force input in models like Grunde's car/spring model. But the models I am trying to make work use the input force at the thumb on the rod as the input and you have to adjust it to get a propper line acceleration curve. Because of the nonlinearity of the rod bending curve and the cosine effect of the rod load on the line, mid course adjustments are necessary to prevent over deflection the rod.
Undaunted, I will continue to labor down my, as yet, unsupported path and try to put some numbers to what I think I feel. And while it can be said, "A foolish consistancy is the hobgoblin of a simple mind," I will forge ahead.
Again, thanks.
Bob
Bob Bolton
www.HATofMichigan.org
www.HATofMichigan.org
-
gordonjudd
- IB3 Member Level 1
- Posts: 2214
- Joined: Mon Jul 10, 2006 12:14 am
- Location: California
- Contact:
I was also wrong in assuming that the "Expert 50" was one cast from 50 people rather than 50 casts from the same person.
Bob,
Not quite. It is from the single CA record of Bruce Richards false casting at 50 ft before he modified his expert style to utilize "constant acceleration." I would assume he had a 9 foot leader so that cast would have had 41 feet (12.5 meters) of a #5 fly line out the tip of the rod.
But I remain convinced that there is an inflection point as the rod loads because I can feel the rod load in night casting and I adjust the rest of the stroke accordingly.
Just keep in mind because of the loaded frequency of the rod/line there is a delay in the response of the tip to the change in the angular acceleration at the butt. That delay complicates the time constant for the feed back process you are trying to model.
Undaunted, I will continue to labor down my, as yet, unsupported path and try to put some numbers to what I think I feel. And while it can be said, "A foolish consistency is the hobgoblin of a simple mind," I will forge ahead.
Persevere! Studying the physics of casting is part of my Alzheimer's prevention program, and I hope I can continue to learn something new every day. The same for you.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
Who is online
Users browsing this forum: No registered users and 0 guests