
PLEASE NOTE: This is the Archived Sexyloops Board from years 2004-2013.
Our active community is here: https://www.sexyloops.co.uk/theboard/
Our active community is here: https://www.sexyloops.co.uk/theboard/
Excellent Double Spey Video - Good explanation of the technique
-
sms

- IB3 Member Level 1
- Posts: 2778
- Joined: Tue Mar 09, 2004 12:25 pm
- Location: Helsinki, Finland
- Contact:
{kind=link}
The framework in the case of upper hand fulcrum, the observation framework is in that hand where it grips the rod. Any other place, if not moving exactly the same as the upper hand, the fulcrum will be elsewhere. I suspect no-one moves ie. their head with the top hand.... 
I'm here just for the chicks.
President of The Village Idiots of Vantaa Rapids
President of The Casting Federation of Finland
-Sakke
President of The Village Idiots of Vantaa Rapids
President of The Casting Federation of Finland
-Sakke
-
gordonjudd
- IB3 Member Level 1
- Posts: 2214
- Joined: Mon Jul 10, 2006 12:14 am
- Location: California
- Contact:
There is physically nothing "wrong" with a casters saying, that his top hand is the fulcrum of his double handed rod and driving with the bottom hand, because of the framework he's judging this - his moving body, he lives inside.
somewhere else, because of the framework, the perspective and the two dimensional measurement; simply of the restriction of the method.
Juergen,
I don't know what you mean by "fulcrum" here, but if you mean it to imply it is the point in space about which butt of the rod is being rotated around during the cast, then you are not understanding the I.C. concept.
As noted in the Wikipedia article the velocity of the body at the I. C. is zero and at any other point the velocity is equal the angular velocity of the body times (its rate of rotation in space) times the distance from the I.C. to that point on the body. In our case the rigid body is the stiff (nearly rigid) butt of the rod. The velocity of a point on the butt of the rod near the top hand is not zero during most of the cast so that means it could not be the center of rotation.
Just looking at the frame grab below from Aitor's video you can see the rotation is centered at his right elbow when he was producing the maximum angular velocity on the butt of the rod.

That means most of the rod rotation at that point was coming from a straightening of the right elbow, not by pulling back on the bottom hand while the "fulcrum" of the top hand was staying in place. Other styles would produce a different result, but as shown in the "stickman" simulation the calculation used to compute the instant center of rotation tends to track the joint that had the maximum angular rotation velocity at any point in time.
It is never that simple in an actual cast as the the rotation rarely comes from a single joint at a given point in time as shown below for one of Chris Korich's casts. You can see that at MAV most of the rotation was coming from his elbow, followed by his shoulder, and the rest coming from the wrist.
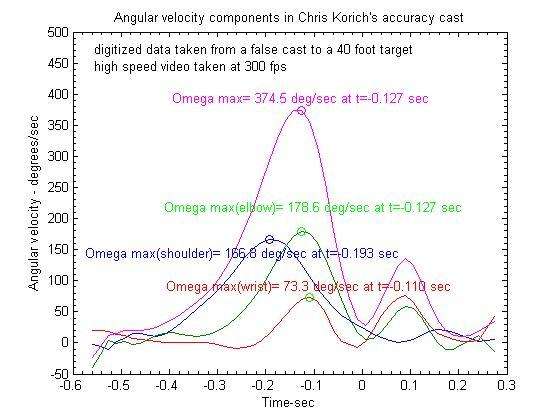 . Consequently the IC that results from a combination of joint rotations is not about any particular joint, and when those rotations result in more translation of the rod butt than rotation of the butt, then the IC will move to a point that is a considerable distance away from grip of the rod.
. Consequently the IC that results from a combination of joint rotations is not about any particular joint, and when those rotations result in more translation of the rod butt than rotation of the butt, then the IC will move to a point that is a considerable distance away from grip of the rod.I think the I.C. that is computed for the two handed rod would also show which joint (or combination of joints) is producing most of the rod rotation as well. As the rod goes to RSP in Aitor's cast you can see the I.C. moves to the midpoint between the hands. That means the rotation is being produced by pushing forward with the top hand and a pulling back on the bottom hand.
That is more in line with how I thought the rotation was produced with a two handed rod, but you can see from the video that is not how Aitor produced the maximum angular velocity of the rod in this particular cast.
Jurgen, the framework must be fixed to the ground as that is the framework we are casting in.
It is probably obvious, but the two dimensional frame used in these calculations is the inertial frame frame that is perpendicular to the lens of the camera. The zero Z axis plane in that frame corresponds to the three points on the butt of the rod that were digitized to get the x and y data points.
Thus these calculations have no depth information, but do show where the x and y points of the IC would be assuming the rod is being rotated in the fixed z=0 plane.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
-
springer

- IB3 Member Level 1
- Posts: 225
- Joined: Sat Dec 01, 2007 10:34 pm
- Location: Northumberland
- Contact:
Gordy,
Please forgive my ignorance and my lack of in depth research into this IC stuff.
Would I be right in assuming that in laymans terms you are saying this;
The COR is determined as the point on the rod butt where the nearest balance (or neutrality) of speed between top and bottom hand is achieved?
Please forgive my ignorance and my lack of in depth research into this IC stuff.
Would I be right in assuming that in laymans terms you are saying this;
The COR is determined as the point on the rod butt where the nearest balance (or neutrality) of speed between top and bottom hand is achieved?
-
gordonjudd
- IB3 Member Level 1
- Posts: 2214
- Joined: Mon Jul 10, 2006 12:14 am
- Location: California
- Contact:
Please forgive my ignorance and my lack of in depth research into this IC stuff.
This instant center of rotation is not a simple concept to understand but if you have not yet done so you might want to read the Wikipedia article to get a better idea of what it is all about.
The COR is determined as the point on the rod butt where the nearest balance (or neutrality) of speed between top and bottom hand is achieved?
I do not know what you mean by COR in your question, but if you mean center of rotation you are leaving out an important constraint that this concept only applies to a fixed instant of time thus I.C. (for instant center) is a better abbreviation than COR since it is important to keep the time constraint in mind when you are applying it.
Also, I don't know what you mean by "the balance of speeds", but I think you are missing the basic premise of what this is about, since more than just the force couple from the hands is impacting the rotation of the rod for most of the cast.
As described in the Wikipedia article the instant center of rotation is a point in space (not necessarily on the rigid body) that has a zero velocity arising from the rotation and translation of the rigid body at a given time point. At that instant of time the velocity of any point on the rigid body (in our case the stiff butt of the rod) can be determined by multiplying the distance from the center of rotation to the point in question times the angular velocity (measured in radians).
All of the points on a rotating rigid body will have the same angular velocity, so this concept can greatly simplify the calculation of the velocity at different points on the body at one instant of time.
It takes both the translational and rotational velocities into account. Thus if the body is not undergoing rotation the I.C. will move to infinity. That is why the red dot goes crazy at the beginning of Aitor's cast when most of the movement of the butt of the rod is coming by translating it with a nominally fixed rotation angle.
Near RSP when the top hand is moving forward and the bottom hand is moving backward at the same velocity then the I.C. will be at the midpoint of those two velocity vectors.
That is what happens to a wheel that is spinning in the air about its hub. In that case the zero velocity point is at the rotation axis of the wheel. However, when the wheel is moving along the ground, then the zero velocity point (assuming there is no slippage) moves to the point where the wheel makes contact with the ground and thus the I.C. moves to that point as well as described in the Wikipedia article.
I hope that is of some help and is not just adding to the confusion about the instant center of rotation concept. Just remember that the I.C. is the point in space that has zero velocity at a given instant of time since the radius at that point is zero and thus its omega*r velocity component will be zero as well. In a body that has some translation as well as rotation then the I.C. will move as a function of time as you can see from the movement of the red dot in the video.
If the rod was being moved with pure rotation (as assumed in my stickman simulation), then the I.C. of rotation will be close to the joint that is supplying most of the rotation. Near MAV most of the movement of the the butt is due to translation, thus the instant center of rotation that you see at MAV can give an indication of which joint (or combination of joints) is supplying the majority of the torque that is rotating the rod.
You can see from the plot in post 107 that Chris Korich was using rotation from the elbow, shoulder, and wrist to rotate the rod at MAV. That results in the I.C. being above and slightly left of the elbow as shown below.

Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
-
springer
- IB3 Member Level 1
- Posts: 225
- Joined: Sat Dec 01, 2007 10:34 pm
- Location: Northumberland
- Contact:
Gordy,
Thanks for taking the time to make such a detailed reply, I will take the time to try and digest the wikipedia article.
What format of video footage would I need to supply you with for a series of different style of casts to be looked at. I can shoot at 60fps HD which can then be slowed to as much as 300fps.
I assume this must be shot looking at the caster from the side?
Thanks for taking the time to make such a detailed reply, I will take the time to try and digest the wikipedia article.
What format of video footage would I need to supply you with for a series of different style of casts to be looked at. I can shoot at 60fps HD which can then be slowed to as much as 300fps.
I assume this must be shot looking at the caster from the side?
Hi!
"For most double hand casters, the ideal casting balance point is located within a hands grip width at the top of the upper handle. This is your "pivot point," while performing all of the Traditional Spey cast presentations. It is important that this balance point be determined with the reel and line in place. This balance point can be off set rather easily, and therefore can be adjusted just as easily! Often times the use of a down-lock seat arrangement rather then an up-lock seat will be enough to balance things out. The materials used for the lower grip can also make up the difference. I will often make the lower grip either totally or partially of wood, rather then cork. This not only adds a lot of class to the look of the rod, but will balance it out very well. Wood species can vary a lot in weight. Mango, although quite hard can be nearly as light as burl cork, Vera or Olive for example, can be much heavier. Burl, or rubberized corks are substantially heavier then normal rings, and can be utilized on the lower grip to the rods advantage. I try to avoid point weighting the immediate butt end of the blank with lead shot, metal washers etc. This technique seems to off-set the rods overall balance rather then enhancing it"
Found here:
http://flyanglersonline.com/features/spey/part3.php
"For most double hand casters, the ideal casting balance point is located within a hands grip width at the top of the upper handle. This is your "pivot point," while performing all of the Traditional Spey cast presentations. It is important that this balance point be determined with the reel and line in place. This balance point can be off set rather easily, and therefore can be adjusted just as easily! Often times the use of a down-lock seat arrangement rather then an up-lock seat will be enough to balance things out. The materials used for the lower grip can also make up the difference. I will often make the lower grip either totally or partially of wood, rather then cork. This not only adds a lot of class to the look of the rod, but will balance it out very well. Wood species can vary a lot in weight. Mango, although quite hard can be nearly as light as burl cork, Vera or Olive for example, can be much heavier. Burl, or rubberized corks are substantially heavier then normal rings, and can be utilized on the lower grip to the rods advantage. I try to avoid point weighting the immediate butt end of the blank with lead shot, metal washers etc. This technique seems to off-set the rods overall balance rather then enhancing it"
Found here:
http://flyanglersonline.com/features/spey/part3.php
Who is online
Users browsing this forum: No registered users and 0 guests