I can not see where, in this case, there can be any negative or retarding force applied by the caster. There are only two points of contact and neither can apply a negative torque.
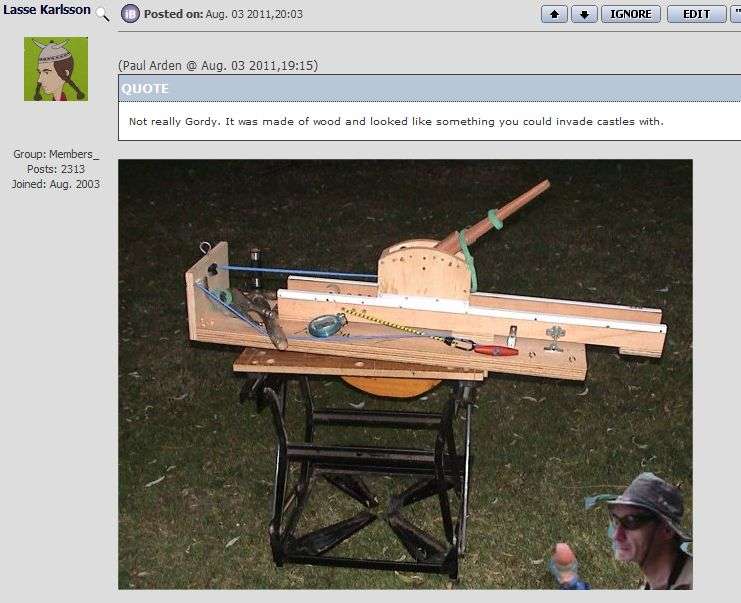
That is a very interesting observation, but I think the rod rotation is stopped in that case from the impact dynamics of the rod butt with the heel of his hand.
That impact force is still resulting in a negative torque that stops the rod rotation and does so very quickly. That is the way Jon Allen used to stop the translational and rotational acceleration of the rod with his casting machine. This PAL video only had a 25 FPS rate, so the rod goes from a sizable bend to mid counterflex in one frame, so it is hard to tell when the stop actually happened. Also I do not see any additional rotation from a rebound hump with this device either. When it stops, it stops and it all happens in an instant of time.
It is hard to tell what was causing the rod to rotate with this device from Lasse's picture of it, but I expect it still had positive angular acceleration up to the point it hit the stop.
You can see the base rock from the impact shock and then the rod tip after vibrations to go on for a long time since there was no way to damp the counterflex in this machine. This is the ultimate way to stop the rod in a short time frame but is a rather violent affair.
Lefty also demonstrates a quick stop of the rod in his roll cast demonstrations by slamming the rod section above the grip into his fixed left hand. Big fish can do that by slamming the rod butt onto the gunnel of a boat, but with that quick stop technique the rod butt usually comes out in second place.
If no negative torque was applied, then the rod would just continue to rotate until the tip impacted the ground.
Thanks for bringing that up, as it shows there is more than one way to stop the rod.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
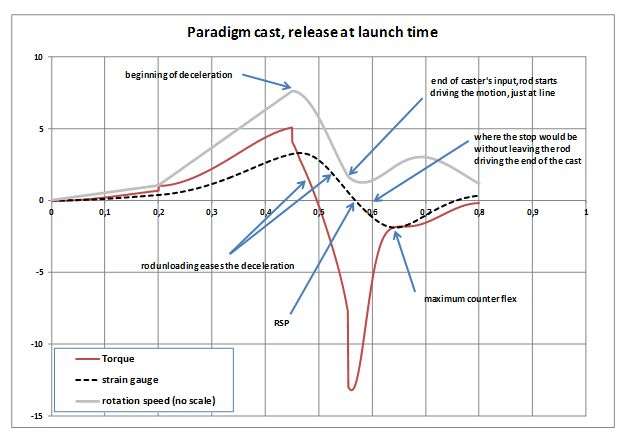
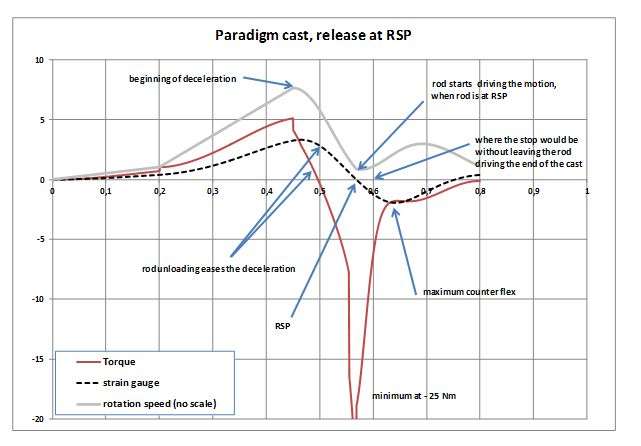
Gordy will again be kind enough to post my graphic. You will see the relative position in time of torque, "strain gauge", and butt rotation speed (like a CA record). The torque is the one produced by the caster to fulfill that cast.
The negative part of the torque does aim at stopping the rod, the hump of the rebound is linked to maximum counterflex.
For those who remember the "cast and release" issue, this simulation is illustrating something like that. The caster does not rotate up to the stop of the rod, he "let it go on its own" just when the line achieves its maximum speed.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
Merlin,
What do you mean by the notation in your angular velocity plot that "rod starts driving the motion just at line launch timing"?.
In the true 2-D case when do you assume the line is "launched"?
Grunde's slow motion videos show that the line does not start going ahead of the rod tip until a bit after RSP, although the maximum line velocity is a bit prior to RSP.
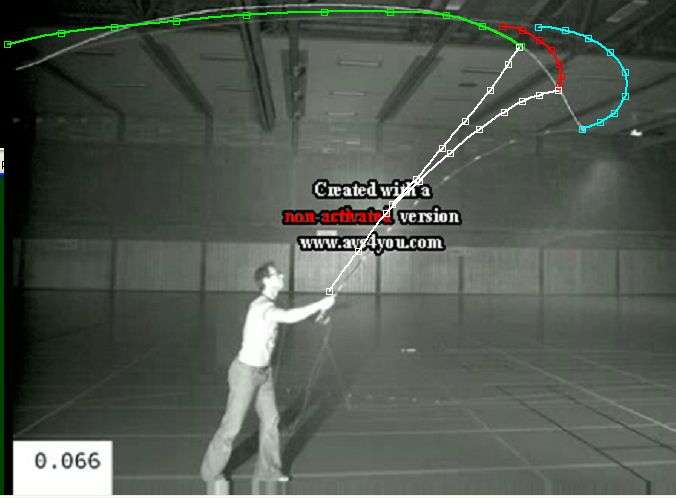
Here are some overlays that show the the shape of the line at different points in the cast. At RSP1 (the green overlay) the line is being pulled down and around by the rod tip so it still lags the x position of the rod tip.
As shown in the red overlay It does not start going ahead of rod tip until the rod tip is about halfway to MCF. Then the loop is not fully formed until MCF as shown in the light blue overlay.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
The rod does not "know" where the moment is coming from, it only "knows" the forces exerted on it on the handle and from the line. In addition to these, there are of course rod's own inertia that might or might not have important effect.
Sakke,
I have been flipping back and forth in thinking about what seems to be a very obvious statement, and would like to get some feedback from you on what you think about what is going with the forces in the casting robot.
I think your statement would be true if the rod itself was a true free body and could move or rotate in any direction depending on the forces applied at the grip and the tip. However, I do not think it is the free body in the casting robot since it has so many constraints on how it can can actually move.
When you look at the bigger picture in the casting robot I think you could consider the rod to be just one part of the many elements that make up the overall free body that can move within the constraints imposed by the hub of the stepper motor.
The rod is actually deformable and is therefore not a rigid body, but in light of Grunde's model can (to first order) be considered to be a a driven harmonic oscillator. Merlin uses a similar model in his analysis of the applied torques in the robot that takes the PE and KE in the flexible portions of the rod into account when he computes the overall power in the rod, reel, line system to determine how the driving torque varies during the cast.
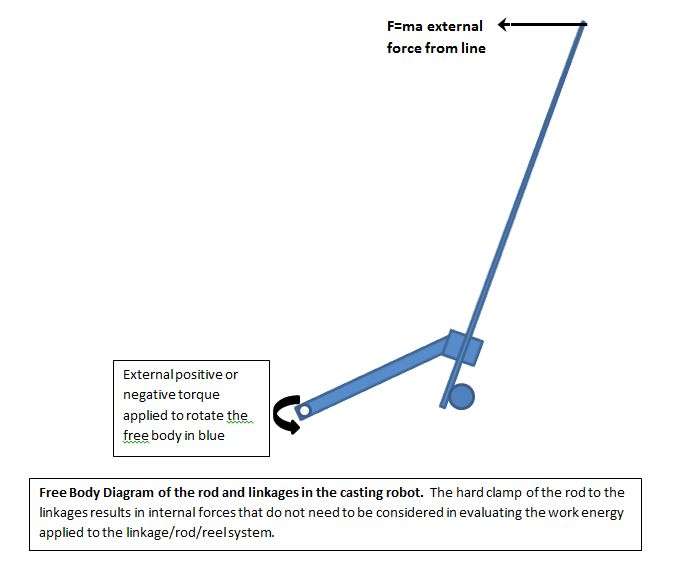
The basic point I am trying to make is that because the rod is hard mounted to the linkages in the robot it (especially the stiff butt) just becomes a part of the overall free body that is driven by the stepper at one end, and has an external force from the line pulling on the other.
Here is what I see as the basic free body (shown in blue) in the casting robot.
Within the actual free body for the robot, the forces on the grip become internal forces just like the frictional forces that are locking the two linkages together. Consequently those internal forces cancel each other out and do not need to be considered in considering the effect of the external forces (shown in black) have on the free body shown in blue.
What do you (or anyone else who is interested in this topic) think?
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
What do you mean by the notation in your angular velocity plot that "rod starts driving the motion just at line launch timing"?.
Sorry Gordy, this is my bad habit to write as least words as possible… Let’s explain that more thoroughly. Up to the point you are referring to, the input velocity comes from the action of the caster. The deceleration of the rotation speed has started (eased by the rod as it is unloading). For the purpose of studying a given case, I decided to change the situation just when the tip speed is maximum, but it is just a choice, I can do that at any other timing (I shall illustrate this point afterwards). Then there is no more input from the caster here, he becomes passive and what happens is that the rod, having still a significant kinetic and elastic energy, will now react and moves the arm / hand of the caster while it spends its energy. The arm/hand model is a mass (inertia), a damper, and a spring which is not used in fact. To take an image I would say that the hand and forearm are going to be moved by the reaction of the rod, and this makes the rebound (as defined by N Perkins and B Richards). Hand and forearm are moved by the rod while the caster tries to dampen that motion.
A good illustration of the rebound phenomenon is Tom's video referenced by Grunde. If you just look at what happens at the hand level, you can see that as long as the caster drives the line, the rod handle is maintained in position against the fingers. Then the rod starts to unload and at some time the situation changes. It is visible here because the situation is exaggerated: no one casts like that with two fingers, we may relax the grip but we hold the handle all along the cast (I know there are exceptions in the forum…). At some time the remaining energy in the rod (mainly kinetic, and partly elastic) makes the rod rotate forward (also because the forearm is stopped) and then the handle rotates and is pushed against the palm of the hand. You are in the situation I am trying to model: the rod “drives” the motion, and we enter in the rebound phase. You can see the hand and the forearm rotating forward at the very end of the video.
In the true 2-D case when do you assume the line is "launched"?
This is a 1D model, then I “launch” the line at max tip speed, and not like you describe in your post from Grunde’s video. The reason why that is the records of the tip speed (see Matthias’s cast and others). They do show a very sharp break at that moment. My model does “break” the speed neatly if I launch the line (marble in my case), even if it is not as sharp as reality. Trying to modify the launching time in the model will worsen this situation, with a less sharp break in tip speed. I do not see how to better match the 2 D reality with my 1D model. Loop formation is out of reach to me for now, and I do not anticipate that this has a significant impact on the torque history, apart the fact it may likely smooth the curves. I give priority to the mechanical logic of the spring and marble model here. If I can do better sometime, I shall try to solve the “line launch” issue for my model.
Coming back to the torque issue, I said I can “release” the rod anytime I want in the model. Let’s see for example the difference when I release later on, which is closer to the real cast record. This time, I decided to start the “release” of the rod just when it is at RSP.The negative part of the torque is of greater intensity because I decided to bring the rod much closer to a stop before giving up the control of the motion to the rod and have the rebound phase.
[graphic “release at RSP”]
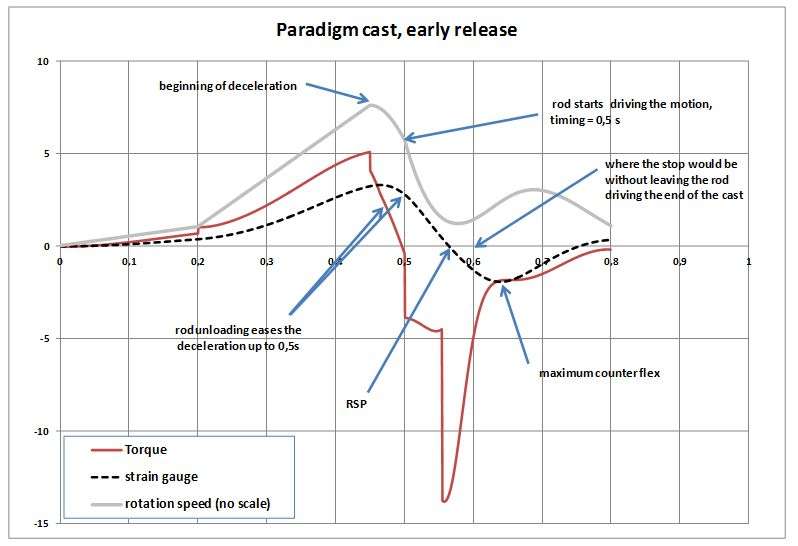
What if I anticipate the “release” even sooner than in the first example, before line launch? I did it for a release timing at 0.5 s, before maximum speed is achieved (0.555 s). There is a slight loss in maximum line speed, but the torque story is changed. The minimum torque value remains the same. What happens is that the caster has to use a negative torque on a longer period of time, more or less destroying the easing effect of rod unloading before line launch. Our dream of finding a way to cast a line with the simple unloading of the rod is vanishing. In this example, the rod does not do the job on its own; there must be a negative torque somewhere to stop it. The best situation seems to be releasing the rod at maximum line speed. This minimizes the negative torque.
[graphic “early release”]
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
If you want to calculate the torque of the motor, you have to take in account the inertia of the linkage up to the rod (and all the tackle, of course). I agree internal (contact) forces are not part of the picture.
In the case of a caster, we should also take in account the forearm and hand inertia (I have data if you are interested in), but in that particular case, we can say their motion and the corresponding energy are part of us, and that we would produce the corresponding energy and torque anyway. What we look for is the difference with tackle and without tackle.
In the case of the robot, you can also split apart the energy needed to move the linkage from the energy needed to move the tackle (fairly simple). Since you look for the torque of the motor, you have to use the rotation of that motor to derive the figures (torque for all stuff, then torque for linkage, then finally torque for tackle by difference).
The advantage of the energy methodology is that you do not have to care for internal forces: you look for kinetic energies and elastic energies. Your guidelines are masses, inertias, spring stiffness, centers of mass, centers of rotation. Speculating about the number of contact points at the hand level is nice, but do not forget some torque produced at the elbow level, hence our preference for the "wrist lock" image. The difficulty is there: in reality, both the wrist and the elbow produce the casting energy.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
To sum up where we are on this topic, I would like to give a broad overview of the intricacies we face in resolving technical issues like this one. There are three Newton laws. To simplify, the first one deals with static situations and equilibrium of forces. The second one deals with dynamics of the motion (the famous equation Force = mass * acceleration), and the third one with contact forces (equal in opposite directions). This third one is often a source of confusion in understanding. Let’s take an example: I push and accelerate a marble with my finger on a table. There are contact forces between the marble and the table, and between my finger and the marble. However, the intensity of the contact force on my finger is not equivalent to the force I apply to the marble to accelerate it. That would only be the case if the marble was glued on the table, resisting the force I apply on it in a static position. This small example gives you an illustration of the problematic linked to these three principles.
To model a cast we apply the second principle at the tip level, the line being modeled by a single mass. The resolution of the equation (mass * acceleration = sum of external forces) gives the “line” motion which depends on the displacement of the rod at its butt. We can calculate line tip/line speed, rod deflection, etc.
When looking for the torque needed to perform the displacement of the butt, we look at the other end of the rod (the handle). And unfortunately, there is no single concentrated mass here to write an equation. Anyway we know the motion we impart to the rod. This situation changes if we model the rebound: in that case, the forearm and the hand are some kind of inert mass on which the rod reacts while it counter flexes and comes back to RSP. So we can write an equation for this mass and calculate its motion during the rebound.
Getting the torque applied to the rod to rotate the whole thing is not straightforward. Ideally we would like to know the forces involved on the line and on the rod, but in the case of the latter, calculating its intensity is difficult for a dynamic situation. So the trick is to compute the time history of energy (kinetic, elastic, for rod and line), derive the power (variation of energy with time) and then compute the torque as if we were acting like a motor. The torque is the ratio of the power divided by the speed of displacement of the butt (a rotation to make things simple). Intermediate calculations are a little bit complicate, as for the kinetic energy of the rod. At the end of the day, it works.
The conclusion from the study is that the rod eases its deceleration as it unloads; the amplitude of this phenomenon depending on the timing between the cast and the tackle speed. However, we need to stop or nearly stop the rod by using a negative torque. In other words, we “pull on the brakes” for a very short while and the rotation slows down, up to stopping the rod or down to a very low rotation speed of the butt. We may not completely stop before the rebound, but trying to stop helps to synchronize the cast. Ceasing to act on the rod and letting it drive the end of the motion is possible (for me this is the cast & release situation), but difficult to control: what indication in time do we have for that? We have none in fact; so the stop or the nearly stop is one way to control the timing without asking oneself “when should I let the rod do the job alone?”. In fact the rod cannot do it all by itself; it has not the required energy to do so, but it can help you and saves some of your energy. You can save a little bit more if you can let the rod drive the motion at a good timing (line launch for example).
Now some of you may disagree, I know. I shall be glad to see what your own model says. I did not get mine at the first trial.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
A good illustration of the rebound phenomenon is Tom's video referenced by Grunde. If you just look at what happens at the hand level, you can see that as long as the caster drives the line, the rod handle is maintained in position against the fingers. Then the rod starts to unload and at some time the situation changes.
Merlin,
Tom's clever example of making a cast with just three fingers holding the rod is a great example of "seeing what you want to see", and that especially applies to me.
I did not understand why Grunde kept referring to this video as being an example of the rod unloading on its own i.e supporting his (and Server's) claim that:
At the butt of the rod the torque (force moment) applied by the caster on the rod is matched by elastic forces from the rod on the casters hand (Newtons 3rd law). I therefore still don't believe in results which deviates significantly from the bending moment observed at the butt of the rod (proportional to the strain gauge readout). If the rod is bent backwards there _can not be_ any reverse torque on the rod from the caster.
I did not see the point he was trying to make at the time which I think was you can see the rod is unloading while the grip is still against the fingers of the rod hand, thus the hand could not be applying a reversing torque. Yet the rod was still unloading all the same. As a result many thought this video was an example that rod must have been unloading from the stored energy in the bent rod.
As such it was an experimental confirmation of Sever Sadik's claim that:
Fortunately, it can be easily shown that prior to RSP the caster never exerts retarding moments//torques on the rod
I looked at the same video and felt the the unloading of the rod in that cast was was initiated with a deceleration of the rotation of the elbow, i.e.:
, but it appears to me that most of the deceleration in that cast is coming from stopping the elbow rotation, not the wrist. There is some moment being applied by the fingers holding the rod since he is keeping the same wrist angle while the rod is bent, but I do not think the wrist (or finger grip) is the major source of the reverse forcing torque in that cast.
As noted earlier, the deceleration can come from any rotating joint (not just the wrist), so I saw that video as a great example that there is more than one way to stop the rod.
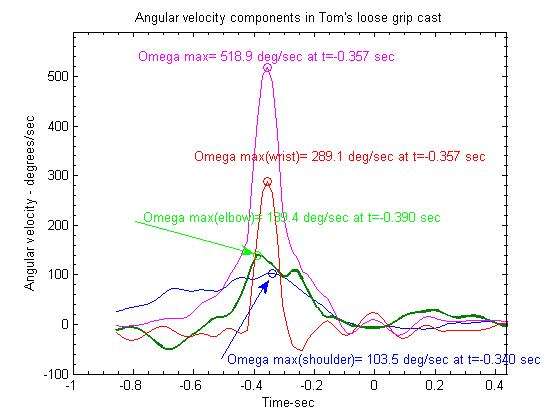
Tom was good enough to send me a copy of his video so it could be digitized and thus get some hard data to show what accelerations and decelerations the rod was responding to in that cast. As you said no one casts that way, and it certainly has an unusual angular velocity profile as shown below:
You can see from the instantaneous center of rotation (ICR) flow for that cast the ICR follows the different angular velocity profiles shown above. There is a very smooth flow from the shoulder, to the elbow, to the center established by the 3 finger grip in that cast. In this case most of the angular acceleration input came from the shoulder and the wrist.
Because of the way Tom was holding the rod it had fairly slow rotational velocities and exhibited a very long unloading time for the rod to go from a modest maximum rod flex to RSP. However you can see the deceleration of the elbow followed by a deceleration of the shoulder rotation started the unloading of the rod about 400 ms before RSP1.
The angular momentum in the rod caused the butt to continue its positive rotation after that "stopping input" and as a result produced a very sharp increase in the angular velocity until the rod butt was stopped by the heel of his hand. That brought the rotation to a very quick stop and even caused a "blip" in the elbow rotation as it reacted to the impulse moment produced by the impact dynamics of the grip with the heel of the hand.
Thus there is no lack of deceleration to cause the rod to start unloading in that cast, and as with the casting machine the impact dynamics with the heel of hand produced a very sharp deceleration of the angular velocity immediately after MAV.
The three finger grip Tom used in that cast was an usual casting style, but nevertheless confirms your point that
However, we need to stop or nearly stop the rod by using a negative torque.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
What do you (or anyone else who is interested in this topic) think?
and
I agree internal (contact) forces are not part of the picture.
It appears that Merlin and I are the only contributors still interested in how we stop the rotation of the rod, but the point that contact forces at the grip are internal forces and therefore cannot do any virtual work on the rod/reel/line system is an important distinction on the energy considerations involved with analyzing the dynamics of a cast.
The same goes for the PE in the rod. As noted in this discussion about the impact of internal and external forces.
In this lesson, we will learn how to categorize forces based upon whether or not their presence is capable of changing an object's total mechanical energy. We will learn that there are certain types of forces, that when present and when involved in doing work on objects will change the total mechanical energy of the object. And there are other types of forces that can never change the total mechanical energy of an object, but rather can only transform the energy of an object from potential energy to kinetic energy (or vice versa). The two categories of forces are referred to as internal forces and external forces.
There are many sophisticated and worthy ways of explaining and distinguishing between internal and external forces. Many of these ways are commonly discussed at great length in physics textbooks - particularly college-level physics textbooks. For our purposes, we will simply say that external forces include the applied force, normal force, tension force, friction force, and air resistance force. And for our purposes, the internal forces include the gravity forces, magnetic force, electrical force, and spring force. While this is a simplistic approach, it is an approach that will serve us well in our introduction to physics.
Internal forces cannot change the amount of total work energy in a system they can only change the form of the energy. In the case of the internal force related to the spring in the rod it cannot add to total applied energy to the line. It can convert PE to KE in the case of a pre-deflected bow and arrow cast, but it cannot add to the original mechanical energy in the cast.
Thus the net effect of the torque applied in the cast will not be changed by the PE in the rod since the rod starts out with no PE at the start of the cast and ends up with zero PE (aside from the PE related to gravity) when the line is "launched" at around RSP1.
To me that means it will not enter into producing the ending KE in the line and rod/reel at the RSP1 point, and therefore can be ignored in determining the net torques (that are applied over different angle ranges) to rotate the rod and apply force over distance work energy to the line.
To me that simplifies the torque calculation considerably, so it will be fun for you and me to come to a consensus on how to approach this problem.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
Actually I believe the line uncoupling begins at max velocity.
If velocity is not increasing energy input is not positive, therfore velocity is reducing (deceleration). It just takes time for the uncouple to be visually apparent.
A body in motion remains in motion unless acted upon by an external means. For the rod to stop rotation a negative must be applied from some source, either the caster or the inertia of the fly line through the tip. Since the fly line has inertia and velocity in the positive direction it's not capable of creating a negative torque. The rod inertia and velocity are also in the positive direction so it's incapable of creating negative load. As Gordon stated the force is from the heel of the casters hand, which is capable of producing a negative value. The fly line distance is obtained at max velocity. The rod unloading only applies a portion of energy acting on slowing the fly line. Only delaying the inevitable.
Actually I believe the line uncoupling begins at max velocity.
If velocity is not increasing energy input is not positive, therefore velocity is reducing (deceleration). It just takes time for the uncouple to be visually apparent.
Eugene,
That is probably true in a one-dimensional world but the way the rod tip applies force on the line is more complicated than that as shown in the overlays shown in post #33.
Max line velocity actually happens before RSP so you can see from the overlays showing the shape of the line at different times the rod is still applying a force to the line well after RSP even though the rod tip velocity is decreasing quite rapidly at that point.
This is an example of how Newton actually expressed his second law. For him F=dP/dt where P is the momentum of an object not the more familiar F=ma form that we were taught in a high school physics course.
Momentum has mass and velocity components so a force can result from a change in either value. In fact as discussed by Hendry it is the change in the moving mass in the top leg that provides the acceleration force needed to offset the drag forces on the line as it propagates in a long cast.
In this case the mass of the line at the tip stays constant and the momentum change comes from the change in the direction of the velocity not just a change in its magnitude. Thus the nature of the acceleration force on the line getting pulled around in a curved path after RSP1 is dominated by the V^2/r form of acceleration.
The force on the line is still equal to F=dP/dt, but in this case it is the change in the direction of the velocity that is important not its magnitude as we typically see in the F=ma form of Newton's second law. Pulling the line around a curved path keeps tension on the line, and it does not appear to start going ahead of the rod until the rod tip is about 1/2 of the way to MCF.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
Been following this thread with a sort of masochistic interest. For all the words, diagrams and graphs - and the apparently happy resolution - I have no idea what came out of this discussion
In this case the mass of the line at the tip stays constant and the momentum change comes from the change in the direction of the velocity not just a change in its magnitude.
Interesting. I guess that's an idealized line in a version of casting simplified for ease of explanation and understanding? So for example when I make a roll or spey or oval cast can the line be simplified to a constant mass at the rod tip?
Been following this thread with a sort of masochistic interest. For all the words, diagrams and graphs - and the apparently happy resolution - I have no idea what came out of this discussion
Magnus,
I think it shows that unlike most of threads here at Sexyloops, the question raised at the start of this thread has been answered. I.e, the aim of the topic that was stated in the first post:
****************************************************
This thread will investigate if the claim made by Server Sadik (that many people seemed to agree with in the harmonic oscillator thread ) :
"Fortunately, it can be easily shown that prior to RSP the caster never exerts retarding moments//torques on the rod and this fact is intuitively consistent with everything most people would believe about fly rod behavior during casting."
can be supported (or refuted) by straightforward rotational dynamics principles.
***********************************************
Has actually been acheived, with the result that Server Sadik's unsupported myth has been "busted."
So for example when I make a roll or spey or oval cast can the line be simplified to a constant mass at the rod tip?
No. (but I think you knew the answer to that all ready)
In that case all of the mass in the line does not have the same acceleration (since acceleration is a vector and thus has a direction component) as it does when the line is trailing the rod tip in a nominally straight line in a conventional cast.
I think you are technically astute enough to realize that is why I used a qualifier for the moving mass direction change when I said:
In this case the mass of the line at the tip stays constant
to clarify that the tension was coming from a change in the momentum just as Newton postulated. However in this case that dP/dt change was due to the change in the direction of the line mass whose velocity direction was being changed not the whole line.
Do you think the line is "launched" when the tip speed starts to decrease, and no longer affects the bend in the tip as it goes through counterflex as Eugene speculated? If that was the case I would think the line would not follow the tip path of the rod as it goes through counterflex and forms the loop.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
Gordon,
To be precise I stated that's where I believe the uncoupling to begin.
As the line speed reaches max velocity the rod tension on the line is reducing. Straight rod equals zero tension. Highest tension occurs at max rod bend.
The line sees three primary loads. Gravity, drag and line tension.
Gravity is constant, drag increases with velocity. Both are negative values hindering line travel. Tension due to rod bend created by the caster is the major driving force to overcome the losses.
This force is highest at greatest deflection and diminishes to zero when the rod is straight. At max velocity the rod has lost enough tension to no longer overcome the forces of gravity and drag. It still has potential energy but lacks the deflection necessary to overcome the losses. At this point the line energy is the principle driving factor. The rod still has enough tension and inertia to maintain position of itself but lacks the ability to accelerate the mass. As the rod tension continues to drop the uncouple becomes apparent forming the loop as rod tip velocity drops below line velocity.
At max velocity the line becomes the major energy component rather than the rod.