The following post is quite long. It may be better printing it and think about the content for a while. Try to take a “view from the sky”, the model is used to look at trends in casting.
Running some tests with the spring & marble parametric model helped to investigate the trends in between rod characteristics and casting parameters. We know that for producing a given amount of energy, we need to move a force over a distance: lower force over a longer distance or higher force over a shorter distance, here is the choice. I chose two timings and different casting arcs to look at this issue, focusing on fishing conditions, for which the linearity of the model is not too far from reality (so don’t try to extend that to casting competition conditions). I used a defined “casting style” meaning that the acceleration is always 78% of the overall timing and the deceleration 22%. I did not vary the style with the type of rod (SH vs DH), but it could be done.
The guideline parameter is the loaded frequency of the rod since it is the one that governs the mechanics of the model. With the hope to ease the understanding, I define a speed indicator, it is the ratio of the maximum line speed with the speed of the corresponding “rigid rod” when rotation speed is maximum. It varies between 1 (broomstick performance) and 1.4 (maximum flexible lever performance. If there was no damping at all, we could reach a little bit more than 1.5). So our objective is to find casting conditions which maintain this indicator at high level.
Here is an example given by Gordy of how that speed indicator is calculated for the acceleration profile in the Paradigm cast.
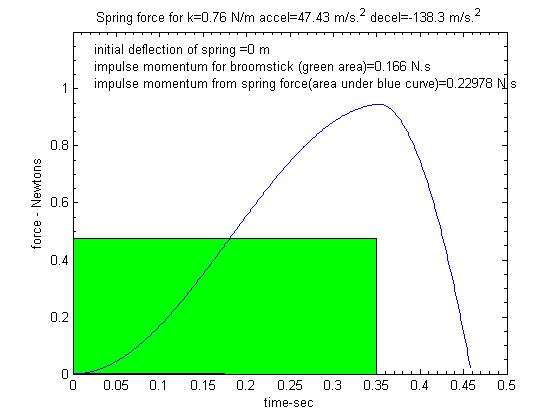
The green area shows the expected force over distance profile you would get using the constant acceleration Mathias used in that cast. As noted in the plot the work energy for the area under that curve was 1.38 J.
The blue curve shows the force over distance curve produced by the flexible Paradigm rod. The area under that curve was 2.64 J. The relative velocity in those two cases will equal the square root of the energy values which would equal sqrt(2.64/1.38)=1.38. Thus you can see that Mathias came very close to the 1.4 ideal maximum speed indicator in that cast.
As an aside the maximum force (shown in the blue curve) was equal to the maximum deflection of 1.27 m that was observed in that cast times the .748 N/m spring constant of the rod. For that deflection, the maximum PE in the rod was computed to be PE=0.5*0.748*1.27^2=0.60 J. Thus the PE/(Work Energy) ratio for this cast was around 0.60/2.64=22%.
In this example, if I take the “lever effect” only, I would say it can provide 1.38 J and if I take the “spring effect” only, that would give 0.60 J. So why do I find that the kinetic energy of the line is 2.64 J at the end, and not 1.38 + 0.60 =1.98 J? It is because the flexible rod provides both a larger peak force (nearly a factor of 2 as compared to the rigid lever) and a longer path (3.9 m vs 1.27 m for the spring deflection) in this example. You can see those relative force and distance values in the blue curve above.
Splitting lever and spring effect seems semantic, although we can put numbers on figures. Should we say the “pure lever” part is 1.38/2.64 = 52%, and the “pure spring” part is 22%? Then we miss 26% of what type of device? Lever and spring together? Should we split those 26% 50/50 because we do not know how to decide or calculate? In my opinion, it is 100% which can be attributed to the “flexible lever”, and the other considerations are good for talking at the bar in the evening.
Why are we looking so much after that? In the end it is both the increased force and the increased distance the flexible lever provides that is important to producing line speed in casting. Mechanically, it is not possible to split the energy in between lever and spring.
We are going to compare the performance of SH rods on one hand and DH rods on the other end, by estimating the maximum line/tip speed and the maximum torque used during casting. The maximum torque occurs when the rod is at maximum deflection. To estimate it, I used the available mechanical equations and the linear model, and I added the effect of the inertia of the rod at maximum rotation speed. Applying this calculation allows to find torque values which are not far from the one obtained with a numerical model. So we are going to compare rods of “similar” swing weight, bearing in mind that differences in torque are realistically sensible beyond 5% variation, to take in account uncertainties (actual swing weights, for example).
Results of the study:
Let’s start with the speed indicator which is linked to the loaded frequency of the tackle, and nothing else. I chose the timing so that the figures fit somehow with SH rods (in blue) or DH rods (in red). It illustrates the link between the casting tempo and the resulting speed indicator. We know we use a longer timing for long rods and that corresponds to their usable range of frequencies. Same story for SH rods. In absolute terms, the higher the casting arc for a given timing, the higher the line speed is.
Now let’s have a look at what happens to the “maximum torque » needed by comparison to maximum line speed.
You are going to see large values of rod deflection; this is due to the linear model. Don’t stick to the numbers but consider them qualitatively: small, medium, large, very large, or maximum, for example.
If I use a SH rod and a given casting (timing, arc), a slower one will help me lowering my torque. This is illustrated by the two black dots below. Each point represents a different rod, the slower one having a much larger deflection and energy storage to give the same line speed. I may have a problem with a tailing loop given the large amount of bend in the slower rod, so I have to find another solution.
Something should capture your attention on this graphic: the curves corresponding to the longer timing do show a different shape. This shape means that under such large timing conditions, a small lack of tuning with rod loaded frequency has significant consequences on line speed. This is likely the reason why casting a slow SH rod with a long timing is difficult. The finely dotted line illustrates the location of maximum speed for different timings and various casting arcs allowing a similar line speed. The shape of the curve is changing for a more “pointed loop” as the timing increases. So very slow rods casting very light lines (10 grams here) are quite difficult to master to get the maximum out of them.
If I adapt my cast to a larger arc and longer timing for the slow rod, here is what I get: the slower rod still corresponds to a lower maximum torque, but its relative deflection and stored energy is now closer to the one of the faster rod. The two situations are pointed by the arrow (1.5 Hz in red and 1 Hz in green) as an example.
For a DH rod, the situation is not very different, although you can see that the level of torque involved is quite high. In relative terms, the consequence is similar also but there is a limit to the maximum torque we can use all day long. Again the faster rod, if used properly, will outperform the slower one for maximum distance, but for day to day casting, it might well be too tiring, especially for a long rod. The sizes of lines we are using do not need a lot of speed. Lines above #8 develop easily in the air. From another perspective, it is less difficult to control the variation of our efforts as we are approaching our maximum. So although the situations are comparable, controlling a slow DH rod is to me easier than controlling a slow SH one.
Starting with a slow rod and long timing (1Hz, green curve), what are the possible options with a fast rod (1.5 Hz)? If I use the small casting (timing, arc), I shall not improve the line speed but will have to use a little bit more torque (1.5 Hz, green curve). Changing for a short casting time and same arc (1.5 Hz blue curve) will drastically improve the speed but at what cost! I have to more than double the torque. Using now both a shorter timing and a smaller arc (red curve), I get similar performance but again I have to pay cash with torque. You can interpolate in between these curves to find a better compromise, but no doubt you will need to increase the torque anyway.
Be careful of misinterpreting the deflection of your rod: a large deflection in a soft rod can store less energy than a small deflection in a stiff one. This is obvious when analyzing all the results of the study. We can also say it differently: a large deflection in a soft rod may produce less applied force than a small deflection in a stiff one. Then you can have a better understanding on the consequences: the length of the tip path (casting arc) has to be adapted accordingly to get the same energy (speed) in the line.
Consider these illustrations as general trends with some orders of magnitude, and thanks in advance to let me know if that make some sense from your experience.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
"Spring force" means the force level the tip adds directly to the line?
If so why does max spring force happen some distance after max deflection?
Bernd,
What do you see in that graph that gives you that impression?
There is no time scale in that plot so there is no way to infer when MRF happened; although it does show the x-distance point where MRF would be expected to occur.
In the SHO model it is assumed that the acceleration force on the line comes from the deflection force from the spring constant for the rod (f=-kx). Since the force vs deflection curve for the spring is monotonic that means the peak acceleration force will exactly match the MRF point.
Maybe you are wondering why the deflection force (the blue curve) is different than the force you would get with a rigid rod (the green curve)?
That is just a property of the loaded frequency of the rod. That lag in the deflection of the rod is similar to the timing you would get by accelerating a simple spring/mass model . Unlike the rigid rod there is a lag in what happens at tip relative to the acceleration force applied at the butt. That is what Merlin's model is all about. It can simulate what that delayed response will look like for a given forcing function as determined by the rod/line k, mo, and mass values.
Here is what the force vs. time plots look like in that cast. The area under that blue curve (the force impulse) is equal to the change in the momentum of the mass of the line. Thus the force impulse value of .229 N-sec would imply the velocity change in the mass would be v=.229/.01 or 22.9 m/s. That is the same velocity value you get with the force over distance work energy approach.
The deflection vs time plot would have the same shape as the blue curve above assuming the force vs deflection curve for the line was f=-kx. It would be slightly different (peak deflection a bit smaller) if you included the non-linear cubic stiffening term for the more exact f=-k1*x - k3*x.^3 relationship for the non-linear spring characteristics of a flexible beam.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
I think Gordy gave a detailed answer to your question. The 1.27 m deflection is corresponding to a situation looking like a bow and arrow cast while an overhead fly cast drives a force over a long distance (nearly 4 meters in Matthias' cast).
Hi Magnus
Because the loaded frequency is the key parameter of the model, I speak of "slower" rods when their loaded frequency is on the low side, and of "faster" rods when their loaded frequency is on the high side.
Generally speaking, since the frequency is directly related to the square root of the stiffness, a slow rod is "soft" and a fast rod is "stiff". This is a general rule and there are many exceptions. At the end of the post I speak about "soft" rods to draw your attention on the fact that even if a rod deflection looks large, it may not correspond to a large amount of stored energy for a "soft" rod. On the other hand, a small deflection in a "stiff" rod may just be equivalent in terms of energy stored.
Thanks to both of you for your kind comment
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
Generally speaking, since the frequency is directly related to the square root of the stiffness, a slow rod is "soft" and a fast rod is "stiff". This is a general rule and there are many exceptions.
Thanks Merlin
Ok that has me asking for more Sorry!
These may be the sort of exceptions you mean - I dunno.
Helios 9ft #5 tipflex and midflex - same stiffness (ERN) - different action (midflex is slower action) - different MOI (midflex has higher swingweight). If it matters, at the CCS deflection the chord of the midflex is longer.
I assume that the natural frequency of the midflex is lower than that of the tipflex. How will the frequency of those two increase with load? Should the graph be the same shape? Does that matter?
Similarly I could list rods where the CCS stiffness and action angle are the same but the swingweights are different due to blank materials, build etc. Again, is the shape of the frequency graphs against load the same shape for those?
Finally - maybe it's just me but to date I'm not aware of casting a rod and the tip speed reducing as I increase how hard I drive it - if I get my form right. Maybe just me not reaching that rate of rotation with 'normally' rated rods.
Up to a point I can follow the idea by just pulling weights with rubber bands, then I reach a point where the band seems to 'lock up' with a heavy load or I pull very fast against a less heavy load - is that the same idea Merlin?
If so why does max spring force happen some distance after max deflection?
Bernd,
What do you see in that graph that gives you that impression?
Hi Gordy, hi Merlin,
thanks for helping to undestand.
Gordy I do understand the graph and what makes the blue curve differ from the red one. It's pretty clear and a well illustrated graph for sure.
I got it from the 1,27m deflection rate of the text below. Got that wrong. Now I understand.
So I can go on working my way further.
Magnus,
I've read it ten times already :kungfo: :p
Btw what is your definition of a fast and slow rod?
Merlin,
can you give an example for each a slow and a fast rod?
Thanks
Bernd
I got it from the 1,27m deflection rate of the text below.
Bernd,
Thanks for pointing out the confusing wording that I sent to Merlin to illustrate how his speed factor is calculated.
I understand where the wording for the maximum force (.95 N) could be confused with the maximum deflection (1.27 m) if you just looked at the numeric values. I hope the new wording will make it clear that the force and the deflection are simply related by the measured spring constant of the rod. As a result the maximum acceleration force happens at MRF just as you surmised.
Splitting lever and spring effect seems semantic,... In my opinion, it is 100% which can be attributed to the “flexible lever”, and the other considerations are good for talking at the bar in the evening.
and
In the end it is both the increased force and the increased distance the flexible lever provides that is important to producing line speed in casting. Mechanically, it is not possible to split the energy in between lever and spring.
Merlin,
What a great synopsis of the spring/swing tradeoff that comes up again and again in these threads. I hope your common sense observations have put that proverbial question to rest. For me you have buried it under a foot of asphalt in the parking lot, and I hope it does not see the light of day ever again.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
Gordy, Merlin,
one may also ask why would we want to call it a flexible lever instead of just caling it what it is:
A fly rod
I think we use those names for pointing a direction where to go for a better understanding of the whole process.
The split between lever and spring finally brought some numbers and now I know that it makes way more sense to call it a flexible lever than a rotatable spring.
I might talk about faster and slower recovering rods. I tend to base comments about that on swingweight not frequency and have an 'all else being equal' clause in there (same length, similar stiffness etc.)
Merlin slightly loses me because, as I understand his work, rod frequency varies with load, unlike Spolek who worked with natural frequency.
Faster and slower action is about bend form (Action Angle) and the influence of the taper. (Taking taper to be a result of a few factors.)
Softer and stiffer rods is about resistance to bending (IP or ERN).
can you give an example for each a slow and a fast rod?
A TCX and a ZXL, for example, or an S4S and a G2. They may not be similar in terms of swing weight so this would affect the estimate of torque (higher torque for higher swing weight).
The purpose of the graphics is to generate trends and not to make exact comparisons from rod to rod, or from casting style to casting style, etc.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
Helios 9ft #5 tipflex and midflex - same stiffness (ERN) - different action (midflex is slower action) - different MOI (midflex has higher swingweight). If it matters, at the CCS deflection the chord of the midflex is longer.
I assume that the natural frequency of the midflex is lower than that of the tipflex. How will the frequency of those two increase with load? Should the graph be the same shape? Does that matter?
Similarly I could list rods where the CCS stiffness and action angle are the same but the swingweights are different due to blank materials, build etc. Again, is the shape of the frequency graphs against load the same shape for those?
I see you are taking a magnifier to look at the graphics. We are speaking of trends here but I can try to go into details.
I guess these rods are within a close range of loaded frequency. That could be checked through measurements. One indication can come from their equivalent mass (mo as noted by Gordy). The smaller the number is, the higher the chances to have a “tip action” rod. However, you could find different speed classifications for a different load.
Let’s start by the unloaded frequency, also called the “speed of recovery”. This is the most common thing we use to classify the speed of rods (as my friend Graig Spolek did in the past). If I use 10 grams of load, the order of speed for the three rods may completely change (because their mo is different). It is likely that these 3 rods have a different unloaded frequency, a different mo and a different curve describing the change in speed with load. But I think that those differences may be not large enough at the end of the day. Maybe the “speed ratio” varies between 1.30 and 1.35, so it would be hard to notice.
But the purpose of my graphics is not to tell you which one is best, it is there to explain that a difference in frequency can make a difference in tip speed under the same casting conditions.
Finally - maybe it's just me but to date I'm not aware of casting a rod and the tip speed reducing as I increase how hard I drive it - if I get my form right. Maybe just me not reaching that rate of rotation with 'normally' rated rods.
Oh yes, I see what you mean but what you are describing here is the fact that when you do that, it is something similar to coming from the green curve to go to the blue one. All is increasing: torque, speed, and the frequency effect is small by comparison to the change in casting conditions. OK?
Up to a point I can follow the idea by just pulling weights with rubber bands, then I reach a point where the band seems to 'lock up' with a heavy load or I pull very fast against a less heavy load - is that the same idea Merlin?
I’m not sure to understand your point here Magnus, can you explain it further please, thanks.
Faster and slower action is about bend form (Action Angle) and the influence of the taper. (Taking taper to be a result of a few factors.)
That’s because you consider the link between taper and frequency, but this is a rule of the thumb. It is the same for speed and stiffness, because of the built in link. Frequency is a parameter per se. Design is a way to achieve a number of characteristics, speed included. We can make fast butt action rods with existing material.
Softer and stiffer rods is about resistance to bending (IP or ERN).
Yes, that’s it and it is simpler than considering speed.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
Hi Merlin,
I always tried to find my wordings/terms in a way my students would be able to understand it and in regard of a rod classification being able to feel/see what I said.
Rod action (bending curve) = Where it bends.
Stiffness = How much it bends.
Fast and Slow:
I tried to relate this to the frequency (time for a bc & a fc)one would cast with it.
TCX = fast rod
SLT = slow rod
TCX (compared to SLT)= slightly smaller arc (to match less bending) + less tip lag + little more force to make it bend a bit more + less cf (tighter loop matching better with higher line speed) = finally: HIGHER frequency >> That's what we feel and see immediately I think.
I don't think we will feel the small differencies in faster or slower recovery times as long as ERN is the same.
I somehow find it useless to use the term "fast" and link it to something we can't feel while casting it.
If I understand your last posting correct you have a quite similar opinion here?
Greets
Bernd








 .
.