Is there a model available which (everything else being equal) shows tip path in relation to the change in the rate of acceleration for a cast using just arc?
Hi Bernd
Something like that?
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
Bobinmich wrote:He obviously could have gotten greater velocity if he had started with some maximum and held it.
Bob, that is exactly why I thought in theory constant acceleration would always give highest max speed for a given arc as long as we are not limitated to not being able to produce max acceleration right from the start.
However a key question seems to be the relationship between tip path and the type of acceleration.
Can't remember when and in which thread I added the following picture. But I think it somehow shows what I have in mind.
When starting with constant accel. we will have more bend in the beginning of the arc. That of course will give a different (starting more flat) tip path. And it is especially the first part which has huge effect to the line dangle.
Indeed I aim to start with "constant" acceleration when I want to keep the dangle as small as possible (for short to medium line length that is). It works!
Again I would love to see a model showing the relationship between tip path and the type of accel. while just rotating the rod (to keep it more easy).
Hi Merlin,
yes I think that goes in the direction am thinking of.
I understand different types of acceleration (constant or cubic increasing for example) to produce significant different tip pathes while still reaching the same final max tip speed.
By analyzing a slomo (ok it's only 2d...) we can show the type of accel. in detail.
We also can show tip path.
The only problem would be to produce two casts of almost exactly the same max tip speed but showing different types of accel.. However I think here in we may find an answere to the best type of accel. in regard of tip path.
Of course for distance casts it would be different again since we will always strive for highest possible speed there and probably can't produce nearly constant accel. anyway.
Could it be interesting to have a graph showing the increase in rod bend vs. time while comparing different types of accel.?
Not sure how difficult it would be to get this with all your obi van engineering software?
Why did Paul start with a low acceleration and increase it to some maximum. He obviously could have gotten greater velocity if he had started with some maximum and held it.
Bob,
It is not so obvious to me.
You may be thinking in terms of only time and broomsticks, without considering the constraint that is imposed the available angle of rotation and the time lag imposed by the loaded frequency of the rod that restricts how fast it can respond to a given acceleration function.
Good athletes tend to self optimize the physics involved with a sport. If constant acceleration enabled you to get higher line speeds then that is what good distance casters would do. But they don't.
Using constant acceleration would burn up the angle of rotation very quickly while the bend in the rod was small as it responded to that big forcing function. Thus they hold off on rotating the rod in order to preserve the angle that larger non-linear torques can be applied to produce more work energy in the cast.
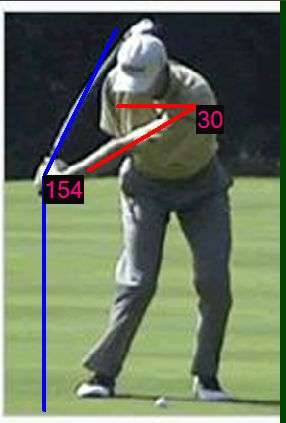
It is similar to maintaining the lag angle in a golf swing to increase club head speed. Look at where the club is pointed when the left arm is pointing down about 30 degrees in Sergio Garcia's golf swing.
That is when starts to apply his large increasing torque to rotate the club over an angle of about 210 degrees.
An amateur golfer who started applying torque at the start of the down swing (casting the club) would have the club pointing near the horizontal at that point. That gives Garcia more than twice the rotation angle that he can apply a big increasing torque over and get club head speeds of around 120 MPH as compared to 90 MPH or less for most amateur golfers.
Different sports, but the same physics.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
What do you assume the hand path looked like to come up with the predicted tip path in your modified 2-D model? Could you modify it to force a match in the two curves?
If you put in a forcing function with a big jump in the acceleration similar to the red Y1 curve in Bernd's example would it predict a dip in the resulting tip path response? That would seem to be the answer to Bernd's request for a model that would enable you to:
understand different types of acceleration (constant or cubic increasing for example) to produce significant different tip paths while still reaching the same final max tip speed.
I don't think you would even have to add in the same final tip speed constraint as I think tournament casters may produce higher tip speeds with an increasing acceleration function to ensure they get a good turn over of the leader in their casts. Then they just modify the length of the tippet to give them the proper "hang" of the fly when the leader straightens out. That enables them to use a higher initial line speed without having the fly kick over as might happen with a different leader set-up.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
Indeed I aim to start with "constant" acceleration when I want to keep the dangle as small as possible (for short to medium line length that is). It works!
You're starting to sound a bit like Frank now! I need proof before I even get excited about this. Can you please tell me how you aim for constant acceleration and then post an analyzer reading showing constant acceleration?!
If you don't have an analyzer I can send you one. Unfortunately the palm top has destroyed itself :p But I'm sure we can figure out a way to make this happen.
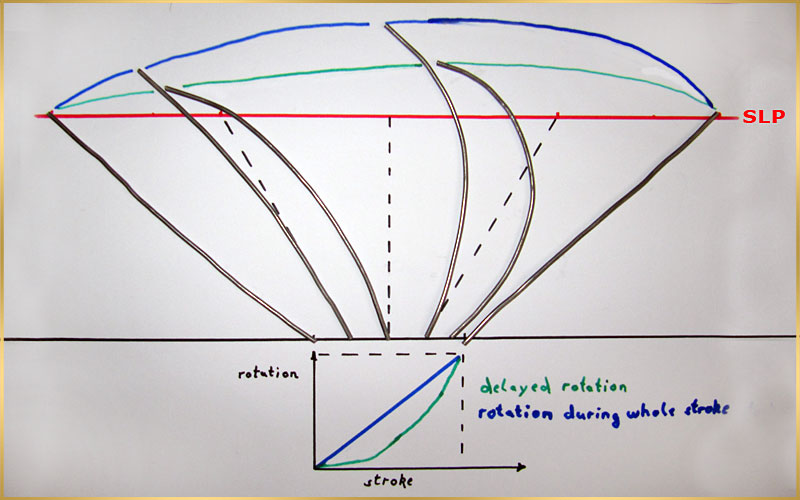
Incidentally I don't agree with your diagram! You have the green rod bent more than the blue one, while what is most interesting is the tip path made at the beginning of the CS with the same rod bend. If the rod has little bend and you are rotating then the tip will rise.
Maybe what we need to is program a robot with constant acceleration to prove this one way or another. My belief is that truly constant acceleration will cause a tail.
Paul Arden wrote:Can you please tell me how you aim for constant acceleration and then post an analyzer reading showing constant acceleration?!
Hi Paul,
I know I can't hit constant acceleration. Don't need the analyzer to agree here.
Since you have been using it much more than me, can you aim for a low smoothness ratio (telling us you get closer to a linear increase in angular velocity = constant accel.)?
If so wouldn't that mean you could aim for it even though you may never hit 1,0 in smoothness ratio?
As long as the arc would match max rod bend while having constant accel. I don't see why that would produce a dip per se?
I don't know, but I do know we start the stroke slowly, and if we start fast the loop tails. Instead of arguing that we're only human, I think we should be analysing why that early part of the casting stroke is slow.
I really think that this constant acceleration "ideal" is a red herring. There are too many examples of non-constant acceleration and not one of constant acceleration. And in order to get anything like constant acceleration from the readings the early part of the casting stroke is being ignored.
Paul Arden wrote:Incidentally I don't agree with your diagram! You have the green rod bent more than the blue one, while what is most interesting is the tip path made at the beginning of the CS with the same rod bend. If the rod has little bend and you are rotating then the tip will rise.
The blue one shows rotation over the whole stroke. Therefore the tip starts to rise immediately in the beginning of rotation.
The green one shows more translation first. That will lead to better tension in the line and to slight pre bend (since there will be very little rotation already).
Than I start the main rotation at the right time (compared to the blue one where it was started too early).
This way there will be more tension when starting to rotate the green one as well as having an initial rod hand speed already.
If there is something wrong in my diagramm could you (or anyone else of course) please draw how it would be correct?
Since we achieve tighter loops due to rotation at the right time instead of too early rotation (or if you like due to a delayed rotation) do we agree that tip path has to be less convex?
Don't get me wrong: I am not going for the "constant acceler. being the perfect theoretical ideal for all casts"
as well as I am not going for the "SLP to be the perfect theoretical ideal for tight loops in general".
But even if 8 (on a scale 0-10) might be the theoretical ideal it can help to aim for 10 to get to 8 instead of aiming for 8 and ending on 7. That's what I have in mind.
Besides the fact that constant is constant and straight is straight. It's much harder to explain what slightly convex means or smooth or progressive or slightly increasing. Magnus would say those are meaningless.
Looking forward to the robot day! :p
(It would beat you in distance ).
Gordy, Merlin,
would it be possible to analyze this first roll cast in regard of a diagramm showing angular velocity vs. time and the increase in rod bend vs. time?
I think that could be very interesting.
Start of rotation would be at 00:09.
Thanks
Bernd
Bernd,
Not until they add a couple of more universal rotation joints coupled with some longer links to produce a longer tip path it won't. Adding a hauling element might be needed also.
I would bet Paul could easily outdistance Noel's robot using his left hand regardless of how much acceleration they programmed it produce.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
would it be possible to analyze this first roll cast in regard of a diagramm showing angular velocity vs. time and the increase in rod bend vs. time?
Bernd,
I looked at digitizing the file I copied from Vimeo, but I think there is too much blur to really get good data from that file.
You can see that because the shutter speed was not fast enough when that video was taken the rod and especially the tip just blur out so I do not know what you would mark when you zoom in to get sampling points.
Also the tip is out of frame in some of this and you cannot see the butt end of the rod throughout as well, so that would eliminate being able to get deflection data throughout.
I don't know if the original file would have better resolution to eliminate some of loss that comes from the compression used by Vimeo, so you might ask Aitor to put it on our dropbox folder.
Did you ever sign up so we can share raw files on Dropbox as well?
Gordy
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
As you all know, the relationship between line acceleration and rod butt angular rotation is quite complex. I am starting to think that over analyzing rod butt acceleration is a waste of time until we clean up the connection between it and line acceleration. I am going on vacation for a while. See you guys in a month or so. Maybe you'll have it all worked out.