I take the scientists study as it is, our damping action is positive so I do not see how we can induce a negative damping in the system that would induce instability.
The definitions of stability open my eyes on the corresponding language. OK for saying the system is marginally stable in phase 1 and stable in phase 2 given the damping action of the caster.
The question of close loop control made me ask about our neurological capabilities in that field. From the limited (scientific) source I got, it takes about 250 to 300 ms to make the full loop, and 180 ms to 230 ms to start a new execution of order from the brain including the detection of the necessity to control (our feeling). Let’s take the Paradigm example. In an earlier post, I indicated that the cast can be influenced by a different situation if it takes place during the first half of deceleration (between 450 ms and 500 ms). If I deduct some 200 ms to start a new order coming from a loop control, it means that the perception of the necessity to control took place at about 250 ms to 300 ms, just at the beginning of the acceleration of the system. I doubt it can be the case. As the caster accelerate during this period of time, the full casting order has been given deceleration included, and pullback included if our intention is to do so. So I do believe we stay in an open loop system.
The model can handle a pullback, here it is: in this example, there is a small loss in tip speed (24.6 m/s instead of 25), but the counter flex has increased just beyond 1 m, which is the consequence of the pullback.
No obvious sign of a negative damping activity.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
I think they tuned the negative damping with a sophisticated harware including a computer, but I cannot even imagine what it can looks like. For me the important information is that voluntary action goes along with positive damping.
My rebound model corresponds to the tail (rod) wagging the dog.
The frequency range of the wrist action corresponds also to CA records for wrist, this is why I was not surprised by the article on that point.
I'm pretty sure that the wrist is the source of the "wave" in your cast, and I am impatient to see what you can get from the analysis. It remembers me the spaghetti article found by Grunde.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
My rebound model corresponds to the tail (rod) wagging the dog.
Merlin,
I think that is what is going on as well. As you mentioned above I think our reflexes are too slow to predict what is going on with the tip and try to put in a correction before the rod starts going into counterflex.
The delay in what we do with the input to the rod butt and the time it takes for a torque input change to impact what the tip is doing would just degenerate into a tail chasing situation, so I doubt that active vibration cancellation enters into the way we cast.
I think some people are able to relax their grip at the right time to increase zeta, (I don't think I do it however), but by and large we are just holding on while the rod tip is going through its RSP1 to RSP2 motions. in
Dr. Milner says they have measured the stiffness of the grip using a programmed step in the applied torque and find it varies considerably with grip pressure. A light grip produces torsional K values of around 1 N-m/rad. A firm grip yields values of around 9 N-m/rad. Thus the value of 5 N-m/rad used in their wrist damping paper is probably a reasonable value to use for a relaxed grip on a fly rod.
The maximum value of .84 m that was noted for the Paradigm cast would require a force of .84/.74=1.13 N. That in turn would be a peak torque of 1.13*2.4=2.7 N-m. That would produce a phase change of 2.7/5 radians or 30 degrees. The expected value of that torque variation with time would be pi/4*2.7 = 2.1 N-m. For a wrist stiffness of 5 N-m/rad that would produce a phase change of 24 degrees.
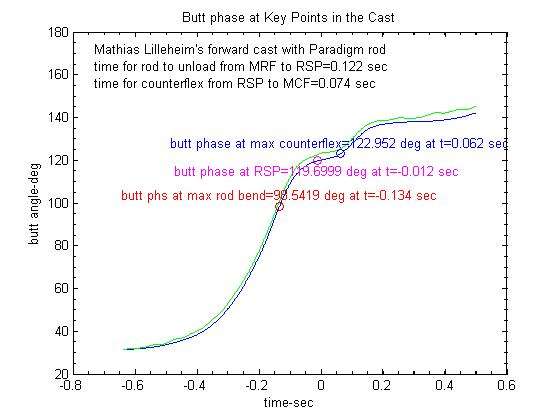
As shown below the measured phase change from RSP1 to RSP2 was around 22 degrees in that cast, so the simple predicted values based on wrist stiffness of 5 N-m/rad is in the ball park of the observed value.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
I doubt that active vibration cancellation enters into the way we cast.
Gordy,
This is the case when one uses a "thrust" intentionnaly, late in the casting motion, like in the TLT style for example, but this is not the way most fishermen are casting (apart in Italy maybe).
Such motion needs training to learn putting in synch several different inputs successively. This is still an open loop situation: we train to learn how to induce the correct input in the rod, there is no time for any feedback once the cast has been started.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
Unfortunately, I have not found the paper, it may not be in the public domain, although it appears that you have reached a reconciliation on the likely values.
I hope that you do not think that I am suggesting a closed loop model, I was only checking my understanding of how you condition the inputs. Modelling the human brain would be a dark place. Although with a reaction time of about 200-300mS and a casting half cycle of about 0.5 secs, there is a small window of opportunity to adjust a cast. On more considered efforts, I can dump a cast in flight if it is headed towards a tree branch.
When I talked about "regardless of the value of zeta", I meant I was throwing away any pre-concieved ideas of what the answers should be.
I have been mulling over a couple of the points that have been made. Where the wrist damping paper gives a maximum value of 0.3, I believe that is at the point where the load is barely tolerable. If you decrease the load, our ability to damp it improves.
I would liken it to someone trying to catch objects dropped from a height. With a tennis ball we could damp the load due to acceleration as it fell quite easily but if we tried to catch a brick falling from the same height our damping ratio would fall away from unity.
Going back to pullback, I think I have misunderstood how it is done. Looking at Gordies video again, the pullback is done around RSP 1. Pulling the hand back at the same time as rotating the wrist forward, increases the rotation of the thumb. I cannot find any other videos to compare against but this rapid increase in rotation occurs while zeta corresponds to 0.025, its marginally stable state. It would be easier to get a fibreglass rod into the unstable area than a graphite because of the lower k value.
Off shopping for stuff for my Grandsons christening with my wife, wish me luck.
But instead of gripping the joystick, the palm of the hand was strapped to it. In trying to read between the lines on Gordys post, I am guessing the Hahn paper allowed the grip, which may explain the difference between the 2 results. This paper promises more information but only if you buy it:
I am wondering if the Hahn results are suitable for use for the thumb on top grip, and the later set of papers that I linked to are more appropriate for a finger on top grip?
I agree with Merlin about the dog, that you have to train muscle memory. I am slow to adapt from rod to rod. A casting instructor I know told me that it takes him a few casts with a different set up to fine tune his damping.
Thanks for keeping our eyes open on new subjects. This one is quite fascinating. It is time to give some interest to a big parameter in casting: the caster himself.
Merlin
Fly rods are like women, they wont´play if they're maltreated.
Charles Ritz, A Flyfisher's Life
I have just caught up with the detail of your post 105 and congratulate you on the match you achieved to the original cast using the 3 values of zeta.
What I was trying to understand was what is the ideal value for zeta 3 (convention as per your chart) to maximise line speed and what value of zeta 4 would we need to effectively damp the resulting counterflex. I am anticipating the results will closely mimic Pauls "hard stop" cast.
Having got those values, it should be feasible to see how the ccaster used to achieve the maximum line speed result matches up against the papers test subjects; the distribution of results was quite wide:
In the case of stiffness, the mean coefficient of variation for the ten subjects was 11% (ranging from 5 to 16%). In the case of the damping coefficient, the mean coefficient of variation for the ten subjects was 13% (between 9% and 16% for all but one subject, where it was 24%).
Perhaps Mr 24% has the attirbutes to be a competiton caster.
No problem, it is been in the back of my mind that it should be possible but until we had zeta buttoned down it was not worth tabling it.
In post 106, you have put the following below the chart:
No obvious sign of a negative damping activity.
Taking my see saw approach to the world, I view it as the pull back opposed the zeta damping effects to increase the counterflex. However, looking at the value of zeta = 0.22 in Gordys chart at 105, the pullback is not enough to make the cast unstable. I think the way to make the cast unstable here would be to induce a severe hard stop and then pull back. But it would be a lot of work and just induce massive counterflex.
The easiest was to make the rod go unstable would be to pullback in the zeta 1 phase, just before RSP1, where damping is low such as that shown by the Paradigm value of 0.025.
I think that the pullback in Gordys cast may have made the system go unstable. I have no idea what the dynamic instability effects would be in a beam but it is likely to be very energetic. Indeed, it might be sensible to dump this post into the inertial bending thread. Perhaps instabilty excites the higher modes?
Taking my see saw approach to the world, I view it as the pull back opposed the zeta damping effects to increase the counterflex.
Vince,
How are you converting the external f(t) force that has some arbitrary timing to an equivalent negative damping coefficient that would be applied to the y_dot velocity term in the SHO of your see-saw model? Or as Gudmestad posed the question:
In case the forcing function of a dynamic system contains terms proportional to the velocity of motion of the oscillator, the effects will contribute to damping the oscillations.
Looking at the Gudmestad set of view graphs it appears to be a very involved process to come up an equivalent negative damping term in the ODE to account for some of the energy that comes from an externally applied steady state force to the harmonic oscillator.
As he notes:
Increasing amplitudes resulting from negative damping would be non-physical, representing energy generation in the system.
so from an energy standpoint negative damping is unlikely to happen in a force harmonic oscillator with transient force applications.
I think that the transient nature of the acceleration force we are applying to the rod does not really fit with the steady state external force force (constant wind velocity in the case of the Gudmestad equations). Therefore I do not understand how the concept of negative damping actually applies to the forced harmonic oscillator ODE that we are using to look at what goes on in casting.
So how would you convert some arbitrary transient f(t) function (that is independent of the velocity of the moving mass) to get its equivalent negative damping value that would be applied to the y_dot term in the SHO equation? I don't think the "stability" concept that might comes out of that calculation really applies to the damping in a flyrod.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
I have not seen the Gudmestad report, it looks interesting. Please do not confuse my see saw model with control engineering applications but a zeta of 0.025 is a marginal condition for stabilty regardless of the application. The see-saw model is only a good 1st approximation to look at the balance of forces in any system. In the same room you would see it straight away but for now lets sidestep the rabbit hole of its validity.
Looking at your 1st quote. Perhaps there is a bit missing, it reads as a statement and is possibly incomplete:
In case the forcing function of a dynamic system contains terms proportional to the velocity of motion of the oscillator, the effects will contribute to damping the oscillations.
If the forcing function opposes the direction of motion of the oscillator it will dampen the oscillation but it seems incomplete without a vector. Put the opposite sign in front of your forcing function and it would chnage the condition significantly. The next statement is also hard to understand, without seeing it in context:
Increasing amplitudes resulting from negative damping would be non-physical, representing energy generation in the system.
I am not sure how an increasing amplitude could be non-physical. However, the statement can also be read as negative damping would not result in a large amplitude oscillation but create a large amount of PE. Energy generation in a system is typical of unstable systems, see the graph in the bottom right hand block:
The huge accelrations that you are seeing in your inertial bending thread have to be driven by a large energy force. In the aerosystems world, energetic manouevres as the result of a transient input into unstable or marginally stable systems are well known. Watch F-22 or Eurofighter Typhoon in level flight respond to a transient control input. In the acceleration phase of the cast, the rod is only marginally stable and is susceptible to the effects of transient forces such as the pullback.
I think that the transient nature of the acceleration force we are applying to the rod does not really fit with the steady state external force force (constant wind velocity in the case of the Gudmestad equations).
Normally, external winds in a control system are called a gust response, they are transient and represent a step input.
One of the reasons that I wanted to see the cast broken into steps was so that we could look at transient inputs. If you solve the ODE for the rod at the 1st phase value of zeta 0.025 but put in the pullback as your forcing function, what is the result?
If you look at the case of unstable equilibrium below:
I think your pullback takes you from stable equilibrium to unstable equilibrium until about RSP1 where stable equilibrium is re-established by the moving mass and removal of the transient pullback.
Looking at the Gudmestad set of view graphs it appears to be a very involved process to come up an equivalent negative damping term in the ODE to account for some of the energy that comes from an externally applied steady state force to the harmonic oscillator.
Again without seeing the graphs I cannot take a view on his methodology but control engineering has been evolving rapidly for my entrie professional life and there are a number of ways of skinning the cat. The paper below gives a variety of methods, some I recognise and others I do not:
I do have some more easily digestible references but not on this computer. I think we need to tread slowly with this one as it may be new to you and I am out of practice but your maths skills are far better than mine and you may overtake me. I last did control engineering maths in 1990 but the principles I have used in a variety of situations. Most recently in helicopter tail rotor design.
I just assumed you had studied it a bit. Maybe you should look at again, to get a better sense of the context of those quotes.
I think the ODE Merlin is using would say there is no "unstable" condition in the bending of the rod that would come from a negative damping coefficient, and it there is no active vibration control going on.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
I must admit that I thought that you were referencing one of your casting analyses.
In case the forcing function of a dynamic system contains terms proportional to the velocity of motion of the oscillator, the effects will contribute to damping the oscillations.
Should the total damping under certain conditions become negative, the oscillations will grow until the damping again has become positive.
I've looked at your 1st quote and the bullet point underneath it. That confirms what I am saying. Looking at your 2nd quote
Increasing amplitudes resulting from negative damping would be non-physical, representing energy generation in the system.
The title of the slide is:
Variable damping term that could be negative
We only have one variable damping term and that is controlled by the caster. I see nothing in the presentation that is different to my understanding.
If you take the simplistic view that marginal stability (the acceleration phase) is the marble placed on top of a dome; the slightest push will cause it to move. We have momentum caused by the intial motion that keeps carrying the tip forward but the reversal from the pull back distorts the rod into a an "s" shape and "Increasing amplitudes resulting from negative damping would be non-physical, representing energy generation in the system."
I think the ODE Merlin is using would say there is no "unstable" condition in the bending of the rod that would come from a negative damping coefficient, and it there is no active vibration control going on.
I do not know what his repsonse will be, I know he is aware that the rod is marginally stable and in a normal cast I would agree that there is no negative damping going on. However, it is certain that a transient in a marginally stable system that reverses the direction of motion is not going to make a system more stable. The high m0 and presumably lower k of your kk will make the rod less stable that the paradigm.
Where did the active vibration control statement arise in this context.
As a matter of interest why did you pullback the cast?
As a matter of interest why did you pullback the cast?
Vince,
That is just part of my casting style, and is a way to get higher deceleration rates. You can see the deceleration rate in that cast was -15,000 deg/sec^2 so would be considered to be a "hard" stop.
You can see what the model predicts in terms of how the spring speed of the rod at RSP1 is impacted by the deceleration rate here.. That relationship comes out of the forcing function in the ODE and has nothing to do with a potential negative viscous damping term that would lead to a run away deflection problem.
Gordy
"Flyfishing: 200 years of tradition unencumbered by progress." Ralph Cutter
You have misunderstood my response to Merlin, I said:
Taking my see saw approach to the world, I view it as the pull back opposed the zeta damping effects to increase the counterflex.
No mention of negative viscous damping, I am saying that by introducing a pullback at the end of the deceleration phase we reduced the stability margin.
If you look critically at your cast, your deceleration rate was more than a hard stop, the rod begins to rotate in the opposite direction. When you have the butt of the rod going in one direction and the tip in the other it is clearly unstable.
My see saw approach is not novel as an approach to understanding dynamic systems, it is concerned with making a reasoned judgement about the balance of forces in the cast. Simplistically, it looks at the difference between the F(t) term and the damping forces. Sharov puts it into context:
The notion of stability can be applied to other types of attractors (limit cycle, chaos), however, the general definition is more complex than for equilibria. Stability is probably the most important notion in science because it refers to what we call "reality". Everything should be stable to be observable.
So to observe reality we are stabilising the observation by breaking the cast down into snapshots. If we look at the various casts.
Post 105: State 1- zeta = 0.025 - +ve F(t) - probably marginally stable because all of the rod is moving in the direction of the cast
State 2 - zeta = 0.22 - +ve F(t) - stable
State 3 - zeta = 0.7 - +ve F(t) - stable
Post 106 (Pullback @ end of deceleration phase): State 1- zeta = 0.025 - +ve F(t) - probably marginally stable
State 2 - zeta = 0.22 - +ve F(t) - stable
State 3 - zeta = 0.7 - +ve F(t) - stable but lower value F(t) means that it is less stable than State 3 at Post 105
For your cast I have added a 4th state to the snapshot to look at your pullback at th end of the acceleration phase. For the sake of argument I'll call it 1A
State 1A - zeta = 0.083 - -ve F(t) - The -ve F(t) is higher than the opposing damping force because the rod is going backwards, probably marginally unstable.
I am not claiming that the rod is exhibiting negative damping coefficients, I am saying the negative F(t) introduced by the pullback is making the system unstable.